CANedge 2x CAN數據記錄器(SD + WiFi)
功能概述:
CANedge2 是高性能 2xCAN 數據記錄儀,支援 CAN FD 與 LIN 通道,內建 WiFi 模組,適合遠端數據管理。該設備記錄 8-32 GB SD 卡數據,並通過 WiFi 上傳至 S3 或本地伺服器,也可透過網頁伺服器提取。50 µs 精度 RTC 確保時間戳準確,內建加密與壓縮功能提升存儲效率。免費工具(如 asammdf GUI 與 Python API)支持數據轉換與視覺化,適合車輛測試、診斷及車隊管理。
描述













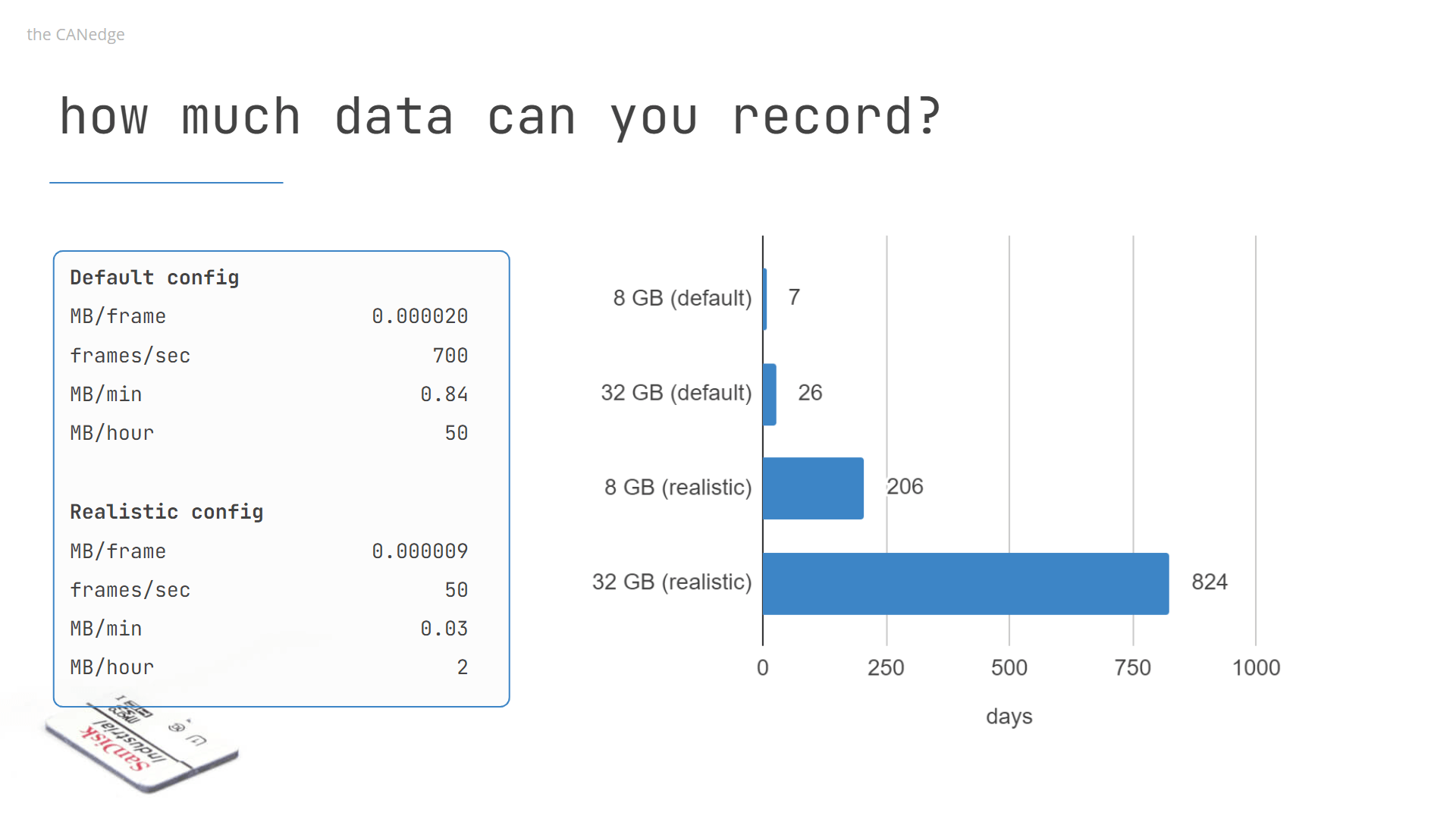
原始 MF4 日誌檔案的大小取決於應用程式以及您想要記錄的資料量。
下面的概述顯示了重型卡車的典型範例(J1939 數據),顯示速度為 700 幀/秒。顯然,如果您記錄所有內容,8 GB SD 卡可讓您全天候 24/7 記錄資料約 7 天,而 32 GB 則可記錄約 26 天。
然而,CANedge 支援用於優化日誌檔案大小的強大選項。因此,下面顯示了一個更現實的場景,其中例如 32 GB SD 可讓您記錄 800 多天。
以下我們列出了一些可讓您優化日誌記錄的關鍵功能:
• 壓縮:啟用壓縮可將資料大小減少 50-80%
• 過濾器:指定要記錄/忽略的 CAN ID(透過範圍和遮罩)
• 預分頻器:您可以透過 CAN ID 自訂頻率,而不是以其「原始」頻率記錄幀
• 控制訊號:根據特定的CAN訊號閾值指定何時開始/停止記錄
如果 SD 已滿,循環記錄可讓 CANedge CAN 記錄器透過先刪除最舊的日誌檔案來繼續記錄資料。
與 CL2000 相比,CANedge1 CAN 記錄器在將資料記錄到 SD 卡方面更勝一籌。但是,CANedge1 不支援透過 USB 進行即時串流傳輸。對於此類用例,我們建議使用 CL2000。
有關使用 CANedge 進行 CAN 日誌記錄的整體介紹,請參閱我們的45 分鐘網路研討會。
下面,我們概述如何開始記錄原始 CAN 資料的基礎知識:
• 將 CAN 記錄器連接到 CAN 總線(可以選擇使用我們的轉接器電纜)
• 裝置開機,偵測位元率並開始將原始資料記錄到 SD 卡
• 斷開裝置連接,提取 SD 並將其插入 PC
• 在asammdf GUI/API等中開啟原始日誌檔案以進行DBC 解碼和視覺化
接下來,您可以設定自己的伺服器並設定 CANedge2 以連接到您的 WiFi 以自動上傳日誌檔案。連接裝置後,如果 SD 卡上有日誌文件,它會自動上傳日誌檔案。成功上傳後,日誌檔案將從 SD 卡中刪除。
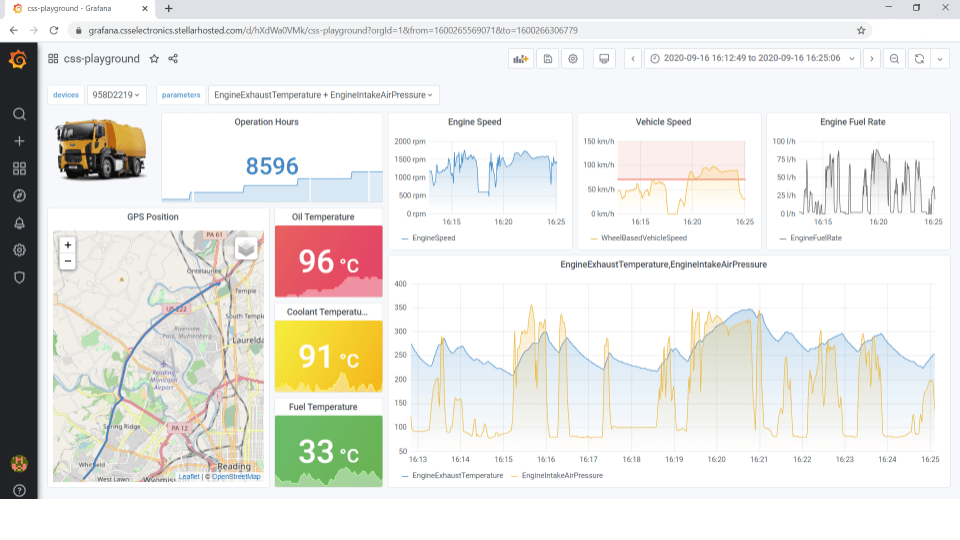
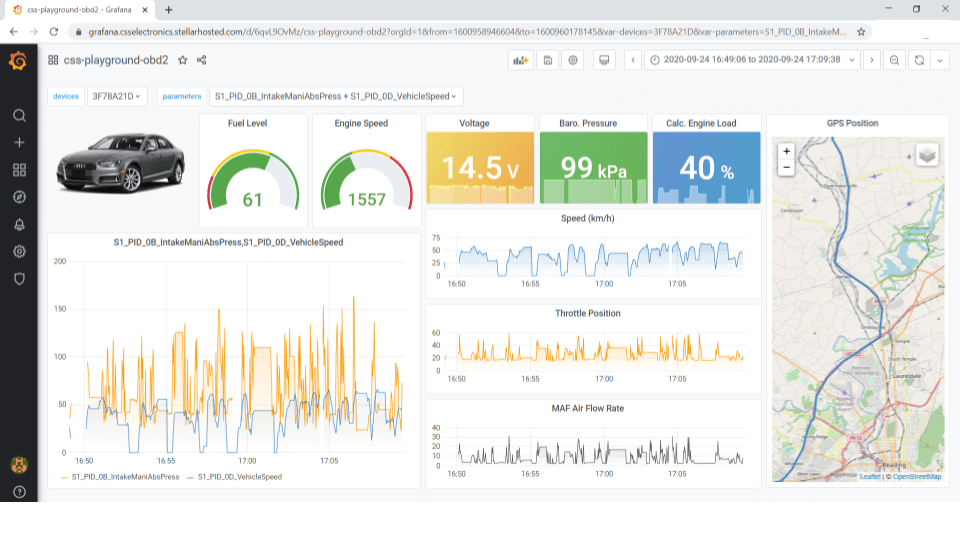
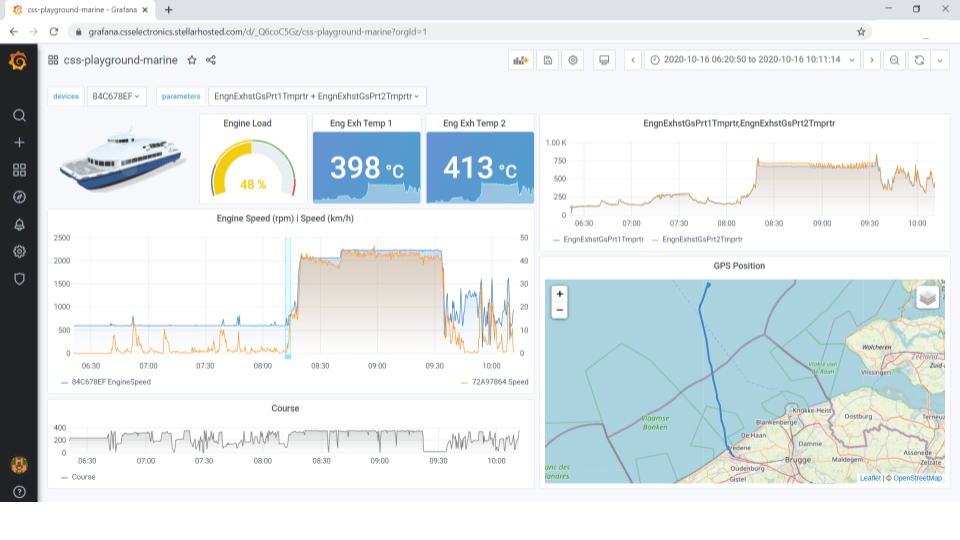
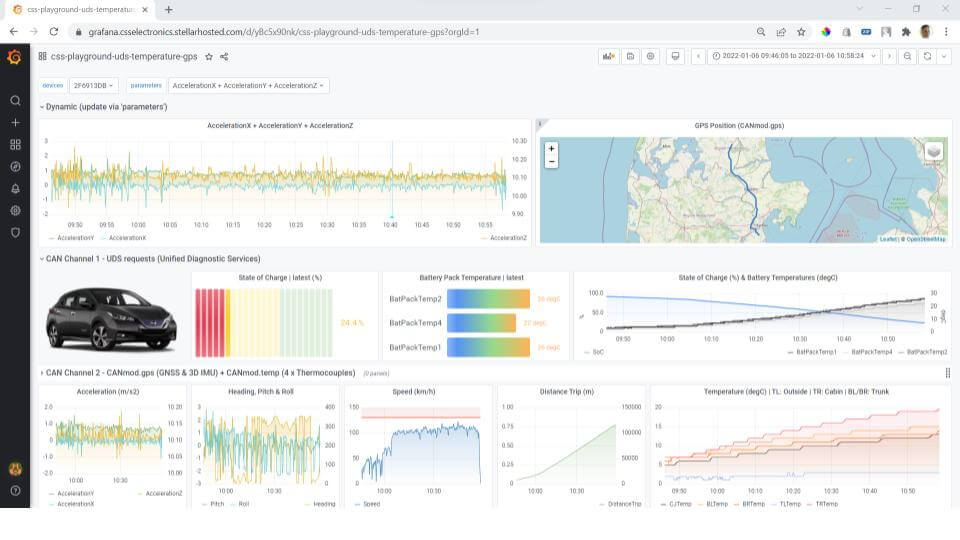
是的,您可以使用我們的逐步指南來設定 100% 免費、可自訂的遠端資訊處理儀表板,以便在瀏覽器中視覺化您的 CAN 總線資料。此整合使用我們免費的Python API來 DBC 解碼原始 CAN 資料(來自本機磁碟或 S3 伺服器)並將其推送到時間序列資料庫。從這裡,可以透過流行的儀表板工具 Grafana 來視覺化數據,從而實現完全客製化的儀表板 – 例如J1939 遠端資訊處理、OBD2 遠端資訊處理、海洋遠端資訊處理、預測性維護等。
有關具體範例,請參閱下面的遊樂場: