
宏虹將提供您所需的任何支援!
專業的宏虹團隊會第一時間回應,為您提供最佳的服務,解決您的一切問題
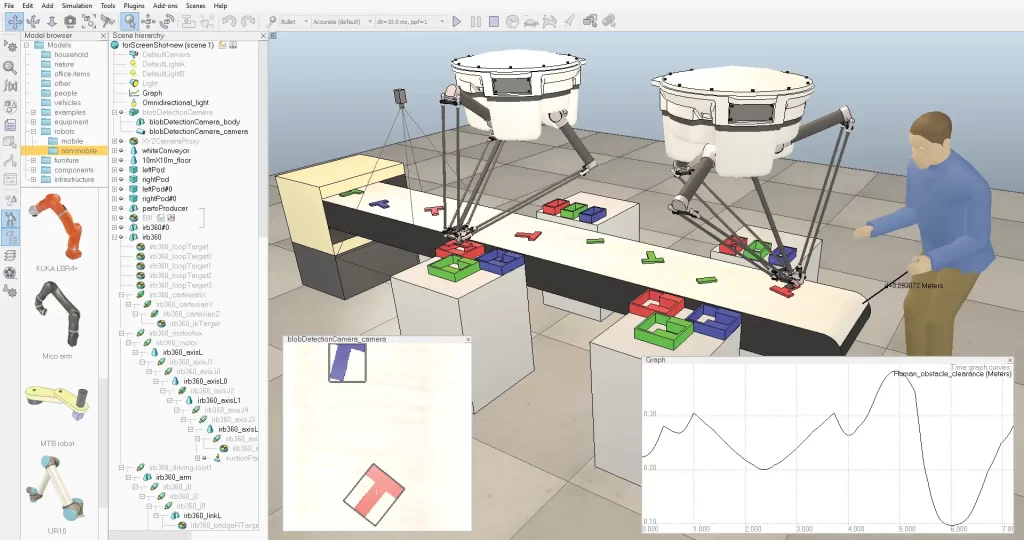
CoppeliaSim 是一款基於分散式控制架構的多功能機器人模擬平台,整合具身智慧應用,可支援從演算法開發、運動學設計到數位孿生建模與強化學習訓練等完整流程。
平台支援「建模-組裝-模擬」的一體化操作,可精準模擬真實物理互動與多模態感知場景,適用於人形機器人、機械手臂等各類具身智慧系統開發需求。同時無縫整合主流程框架與 ROS/ROS2 生態系,大幅縮短開發週期並降低導入成本。
內建 MuJoCo、Bullet Physics 等多種物理引擎,可精準模擬碰撞、抓取、軟體互動與纜索等複雜物理場景。
支援分支、閉環、多自由度與冗餘機構的運動學求解,並提供可嵌入式演算法模組。
支援接觸式與視覺感測器模擬,並可搭配影像處理與擴充模組,支援網格與點雲等資料格式。
整合 OMPL 函式庫,提供高自由度的路徑規劃與運動控制能力。
支援 Python、Lua、C/C++ 等多種程式語言,並相容 ROS 與 ZeroMQ 通訊架構。
高效碰撞與距離計算
提供軌跡生成、自訂 UI、視覺化與幾何計算等功能模組,支援多種資料格式匯入與匯出。
支援 Web 端操作、資料回放與錄影功能,並可進行高效點雲與空間資料處理。
透過模擬快速調整機構參數、關節自由度與感測器配置,於軟體中預先驗證系統協同運作效果,減少實體樣機修改次數,降低研發成本。
在虛擬環境中模擬極端動作、不平整地形與複雜互動情境,提前辨識動力學缺陷與系統不穩定風險,降低實機測試過程中的掉落、碰撞等硬體損耗。
透過模擬自動產生包含深度、語意分割與力回饋資訊的標註資料,為感知演算法訓練提供高品質、低成本的大量資料來源。
建立數位化的機器人本體與環境資產庫,降低對實體實驗場域的依賴,提升團隊在不同設計架構開發上的協作效率。
可直觀呈現機器人在家庭、倉儲等非結構化場域中的運作表現,並透過即時資料視覺化支援演算法評估與展示。
於模擬環境中進行強化學習與運動規劃訓練,降低硬體成本與維護負擔,同時完成軟體預部署與策略優化,加速「Sim-to-Real」轉移流程。
透過動態調整光照、摩擦係數與障礙物配置等參數,驗證模型在不同情境下的穩定性與泛化能力,提升多場景適應性。
模擬設備故障、通訊延遲等異常情境,驗證機器人安全機制,確保實際運行中人機互動與故障應對的安全性。
專業的宏虹團隊會第一時間回應,為您提供最佳的服務,解決您的一切問題
©2026.hongtronics. All Rights Reserved.