車載乙太網 gPTP 時間同步是自駕車與智慧汽車中不可或缺的基礎技術,你知道為什麼自駕車需要精確到 ±50ns 的時間同步嗎?在傳統 CAN 匯流排中,毫秒等級的同步精度足以支援一般控制訊號,但在自動駕駛的場景下卻遠遠不足。舉例來說,當車輛以 120 km/h 行駛時,僅 1 ms 的時間偏差,就可能造成 3.3 公分的空間誤差,直接影響感測器融合與線控底盤協同的可靠性。
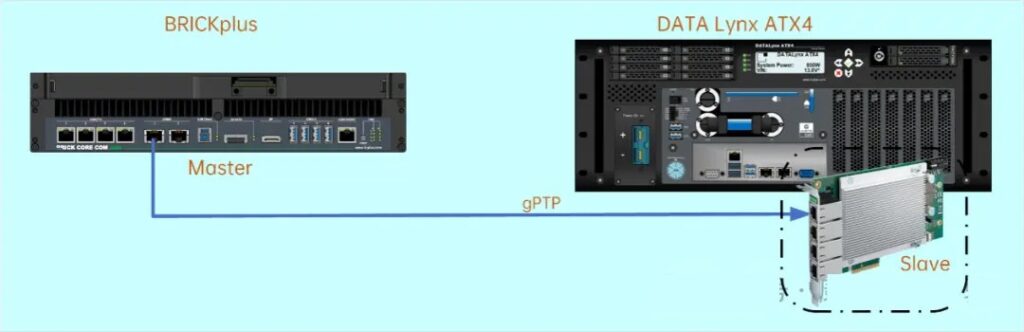
為了解決這一問題,車載以太網 gPTP(Generalized Precision Time Protocol) 應運而生。它能提供 ±50ns 的同步精度,為雷射雷達、攝影機、毫米波雷達 等多感測器建立統一的「時間錨點」,確保資料融合與車輛決策的安全性。


 想深入瞭解車載乙太網 gPTP 時間同步
想深入瞭解車載乙太網 gPTP 時間同步


