
導讀
隨著汽車科技化、智能化、網路化的不斷發展,汽車內部最新的應用和功能正在不斷提高對帶寬、降低延遲、同步、高可用性、QoS和降低成本的要求。當前和傳統的汽車網絡協議不足以滿足這些即將到來的需求。
在這種情況下,車載乙太網的技術運用越來越廣,當然傳統車載網絡技術CAN/CAN FD也不可能被取代掉。至少就目前看來,經過數十年的發展,今天的汽車行業CAN在車載網絡領域佔據著絕對的優勢,CAN已經形成了完善的標準體系,這意味著CAN有著高度的兼容性、完善的開發工具鏈體系、更大的供應商選擇餘地和更低的採購成本(這對於整車開發是極其重要的),所以現階段還是不可能完全替代掉CAN總線。
除此之外,汽車目前車載網絡系統可能還會有 LIN總線、FlexRay、MOST等其他類型的總線。車載乙太網的加入就會使得車載網路系統變得越來越複雜,那麼在這種不可逆轉的大趨勢大背景下,我們該如何保證通訊延遲以及多數據並發的時候,依然能夠保證車載網絡架構滿足功能要求呢?如何才能設計出一種安全的、最優的車載異構網絡系統呢?
如何滿足複雜的車載網絡架構?
上述車載網絡日趨複雜的背景下,車載網絡工程師/架構師急需一款專業並且功能強大的工具,來對初步架構的設計結果進行客觀分析,並且能夠提供可視化的分析結果,從中獲取優化車輛網絡架構優化的思路。為此,RTaW(INRIA下屬公司)為汽車、航空等領域提供了實時網絡的仿真和配置工具RTaW-Pegase。
RTaW 簡介
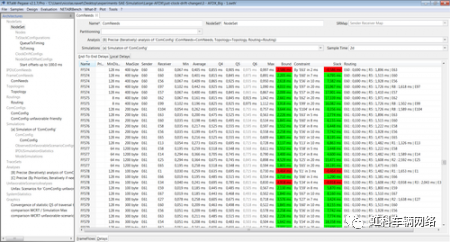
RTaW-Pegase支持 TSN(時間敏感型網絡)、CAN/CAN FD/CAN XL、LIN以及用於車外通信的無線網絡等。除了精確的實時仿真分析外,RTaW-Pegase還可以計算通訊延遲和緩衝區利用率的上限,還包括現先進的自動配置算法來確保硬體和軟體組件的正確性和優化方式。
應用功能介紹
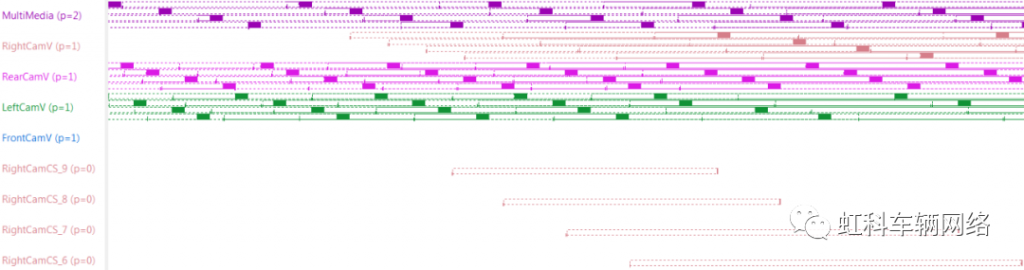
- 快速建模仿真:用戶可快速搭建待仿真的車載網絡拓撲及模型(CAN/CAN FD、LIN、車載乙太網單獨的總線網絡或異構網絡)。CAN/CAN FD:支持導入標準數據庫、設置網關路由模式及其參數,分析時間延遲;車載乙太網:可根據需要選擇不同流量整形(AVB、TSN等)技術,分析不同技術對系統時間延遲的影響。
- 仿真結果可視化:用戶可根據各種不同的仿真結果呈現方式,根據仿真結果分析各項報文的延遲情況等
聯絡我們



