
作者:Ben Martins
你可能會對這個主題很感興趣。這背後的原因是我想分享一種我在花了大量時間研究診斷三相電機的方式時發現到的技術。我發現有一種非常簡單的方式可以做到這一點,與Pico團隊分享後,Steve Smith將它命名為Martins用法。
那麼,讓我們開始吧。
Martins用法利用現有的數學公式來繪製三相電機電流相位之間的關係。被稱為Park Vector Approach,它包含了兩個公式:
• iD = (sqrt(2)/sqrt(3))A-(1/sqrt(6))B-(1/sqrt(6))C
• iQ = (1/sqrt(2))B-(1/sqrt(2))C
i=電流 D和Q只是公式組成的一部分。
這兩個公式必須在數學通道設置正確,並且必須考慮通道中使用的範圍必須符合。其他複雜情況也來自數學,這代表如果我們實際看著他,當軟體從原始數據中獲取數學計算時會有延遲。Park Vector Approach最重要的部分是你必須使用XY來查看結果。在撰寫本文時,XY還未在Picoscope7 Automotive中實施,因此以下的圖片將來自於PicoScope 6 Automotive。它在未來肯定會被添加進Picoscope7 Automotive,並且會很棒,但若我們需要使用XY時,我們不得不堅持使用PicoScope 6 Automotive。
以下的Park Vector捕獲數據是在受控條件下使用VFD單元供應的三相電機,而不是從車輛供電的。
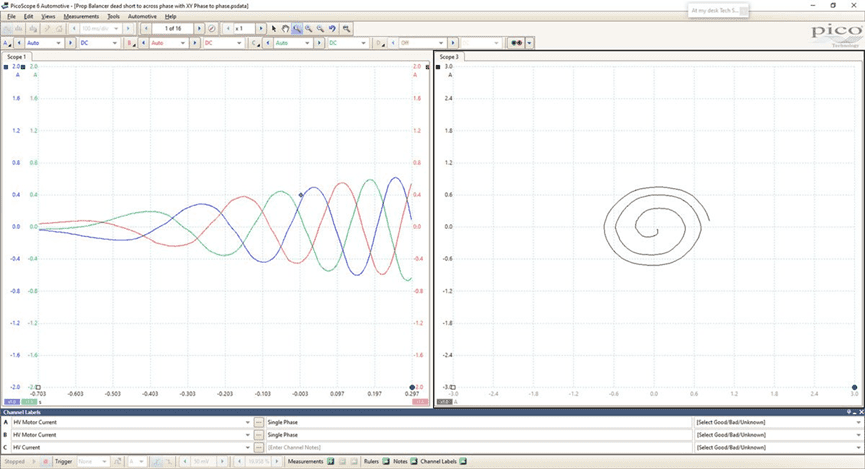
第一個捕獲顯示了啟動期間的三相電機,我們看到的是隨著電流的增加,各相位之間的電流關係形成一個螺旋狀。
當我們進一步加速電機時,會特別明顯。
這是一張很棒的圖片,因為它很清晰並且容易看到可能出現的問題。然而,障礙是在於它是數學這個事實。當PicoScope以區塊模式捕獲數據時(通常低於200ms/div),我們會同時獲得更新,但數學流是在緩衝區末端創建的,並等到下一個緩衝區滿了,才會再次繪製。你還必須重置每個電機的數學,因為當前水平可能不同。捕獲後這不是甚麼大問題,但我們希望實際看到這個問題。這讓我開始思考。如果在不涉及到數學的情況下直接比較當前的相位會是怎樣?
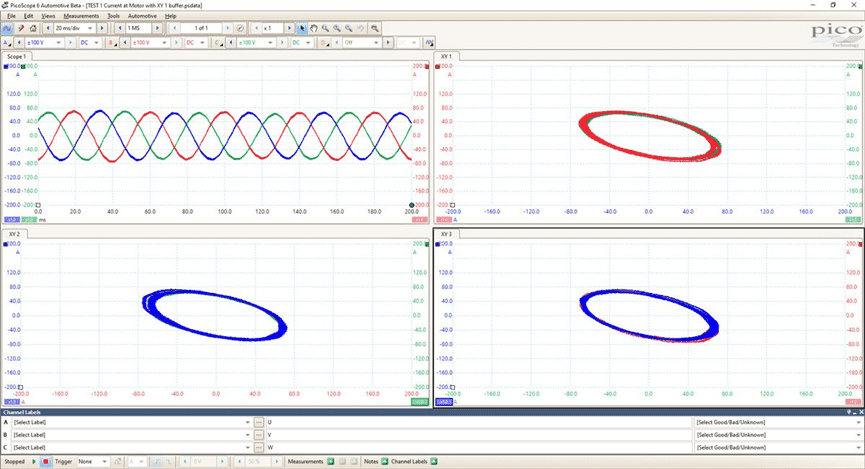
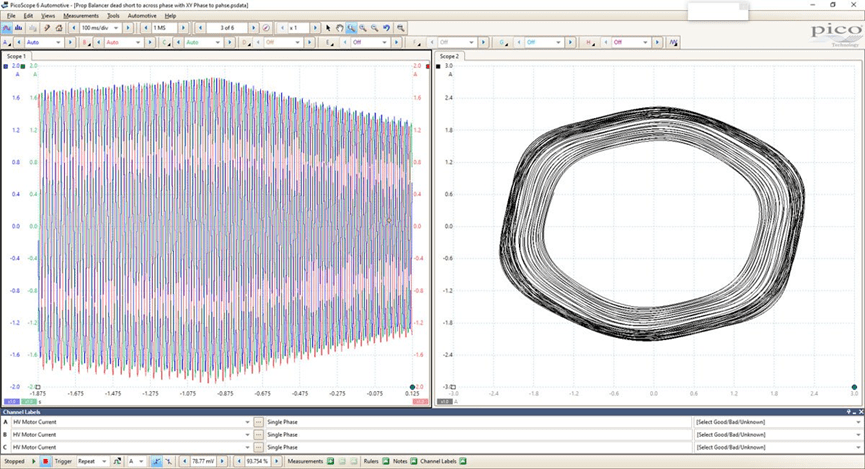
它可能不是一個完美的圓圈,但你可以看到每個相位之間的關係。我們針對V&W相對於U,U&W相對於V以及U&V相對於X。使用XY的好處是它是當前繪製的。這代表,如果你要從靜止狀態啟動電機並且以500ms/div的速度傳輸數據,你實際上會在螢幕上看到他正在繪製。這類型的波型被稱為Lissajous模式。他們通常用於計算具有相同頻續的兩個正弦訊號間的相位差,但我還沒有看到他們被用在電機上的分析。
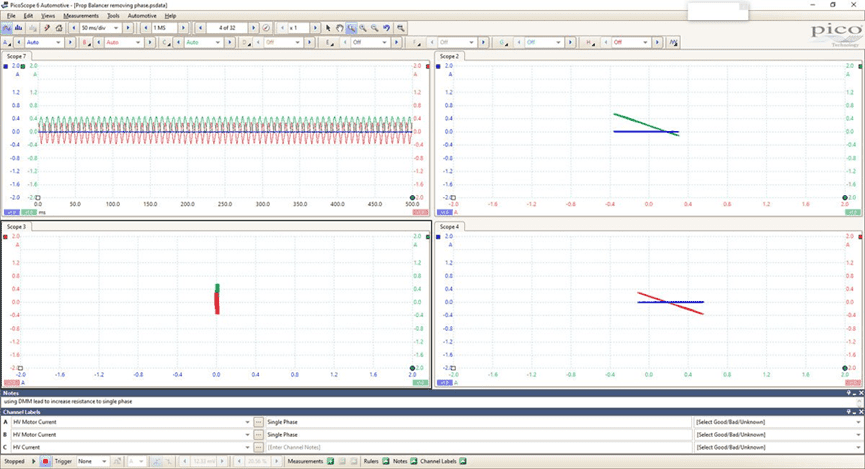
XY的使用可以幫助我們發現電機平衡的問題,因為在正確運行的電機中,波形應該彼此重疊。下面是一個相位中電流不同時的範例:
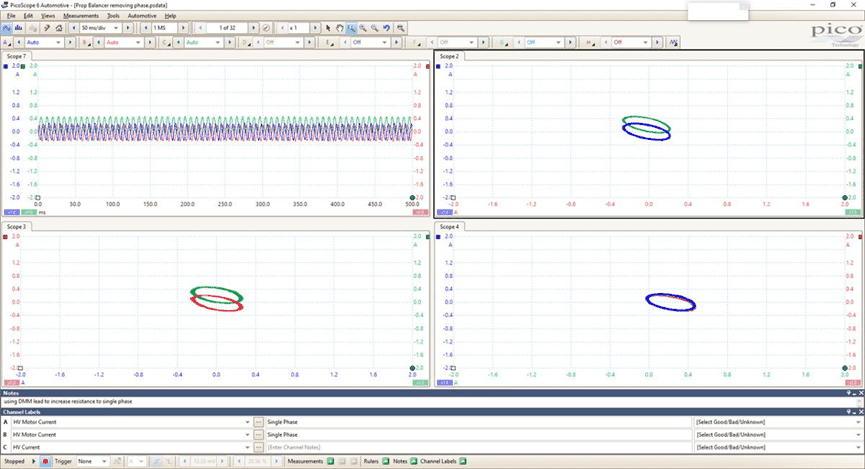
然而,當我們失去一個相位會發生下列波型:
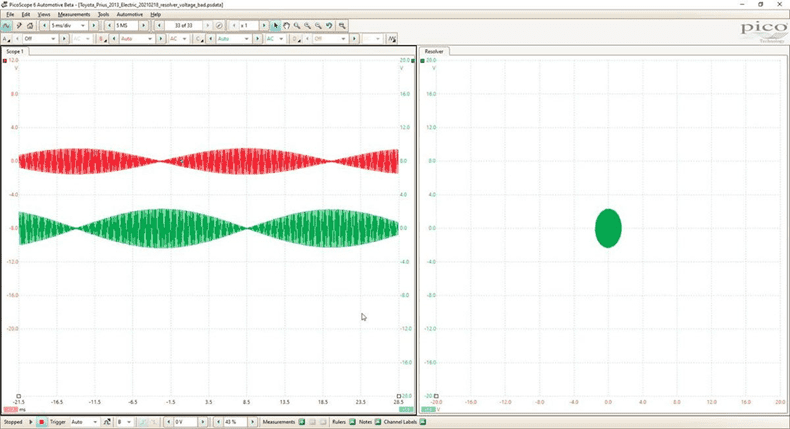
我知道對於某一些車輛要檢測3相電機測試很困難,但在可能的情況下,使用Martins用法可以提供一些關於正在故障排除的電機詳細資訊。但它並不只可以這樣。我們還可以將Martins用法應用在大多數電動車上的另一個組件,旋轉角度感知器。你可能已經在我們的網站中看到我們對於旋轉角度感知器文章,就在底部附近,我放置了一個動畫來展示使用這兩個訊號來確定位置。
在右上角你可以看到正在畫的圓圈,就如同你想的,我使用XY視圖。然而我們有一個數學問題。
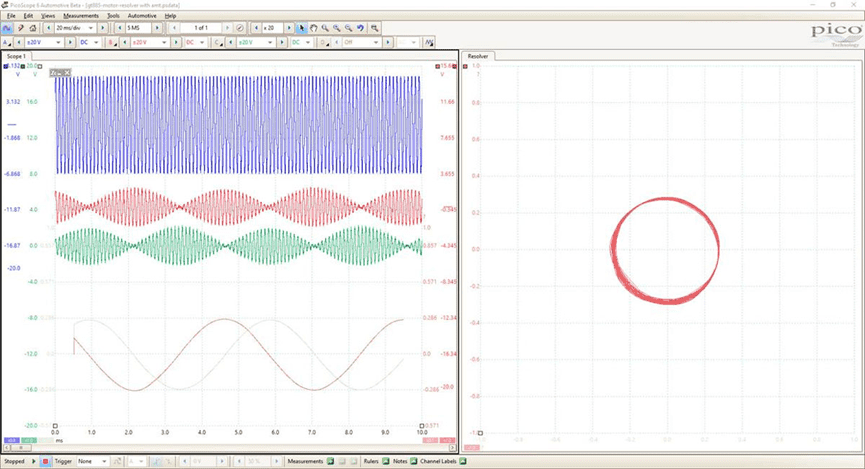
然而,數學的好處就是我們已經移除了激磁頻率,讓我們得到ECU看到的實際訊號。關於此數學方式的詳細資訊,請參閱我們的PicoScope7電動汽車部分的引導測試。結果是一個完美的圓,當問題出現時就會很清楚。我們還可以將Martins用法應用在原始的訊號。由於訊號相隔90度,軟體仍會畫一個圓圈,但它似乎已經被填充。
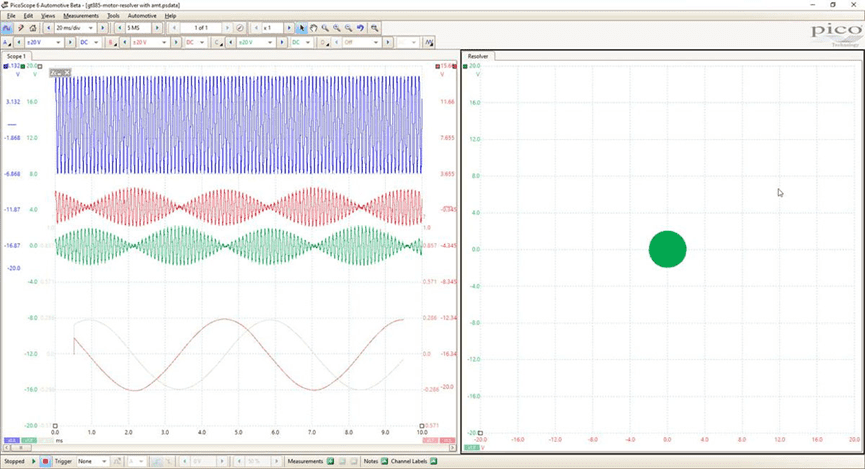
然而,重要的是要注意,你必須確保XY視圖的網格是完全正方形的。你可以透過點擊視圖的左側並將其拉動來調整大小。否則,你會得到橢圓而不是圓形!你可以在Miki Diosy的案例研究影片中看到一個壞的三相電機範例。
下面的截圖是XY視圖中解釋旋轉角度感知器的捕獲數據。
如你所見,這樣可以快速且簡單的確定問題點,最重要的是,你可以在XY視圖中繪製遮罩,代表你可以加載已知的事物。繪製XY視圖並且進行捕獲,快速判斷是否有問題。
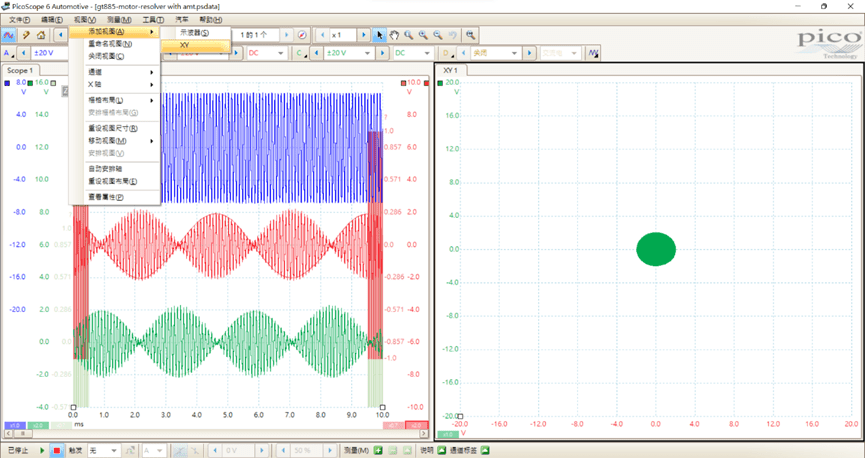
在PicoScope6增加XY視圖的方式,點擊視圖 > 新增視圖 > XY
從這裡你可能需要調整你的柵格佈局。這在PicoScope7中會變得更加簡單,但在PicoScope6中,你可以點擊 視圖 > 柵格佈局
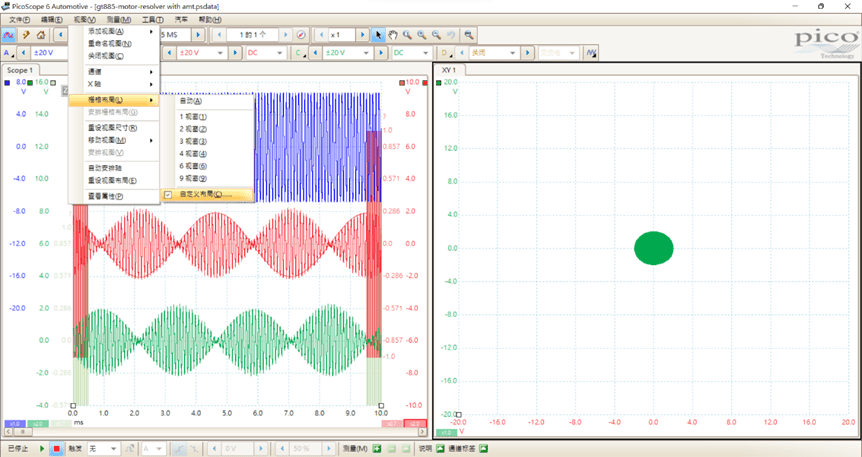
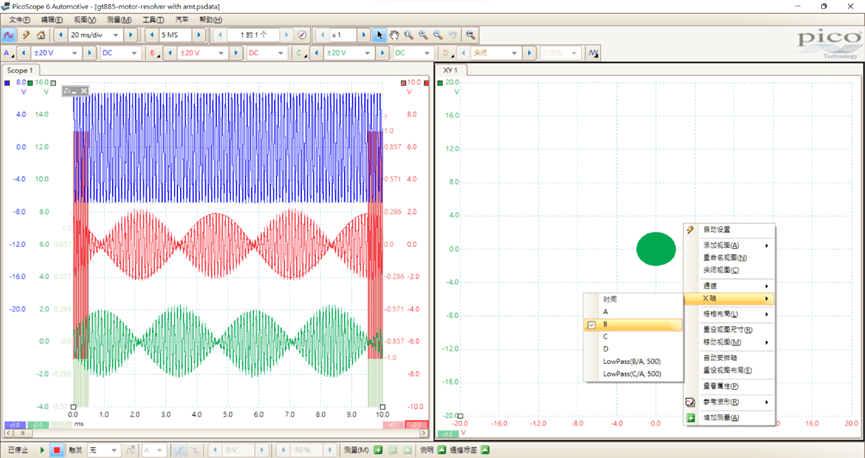
現在你可以編輯柵格佈局。我發現一行兩列最適合這種類型的視圖。獲得所需的XY視圖後,你需要選擇要放在X軸上的通道。你可以透過右鍵單擊XY網格來執行此操作,選擇X軸,然後選擇想要使用的通道。接著你可以隱藏任何其他不重要的通道,也就是在旋轉角度感知器檔案中的通道A和數學通道。
我希望這是有道理的,且對你有幫助。
為了讓你有機會嘗試一下Martins用法,我附上了旋轉角度感知器使用PicoScope6的數據文件供你使用。


