1.基板 FPGA 時鐘信號觸發同步
proFRAME 板卡的 FPGA 產生 40 MHz 時鐘信號(25ns 間隔),可在影像擷取與注入過程中為每一幀圖像打上奈秒級時間戳(Timestamp)。
所有連接的相機皆以此統一時脈信號觸發,可實現微秒級多相機同步,確保影像時序一致,為後續的影像融合與感知演算法提供精準基礎。
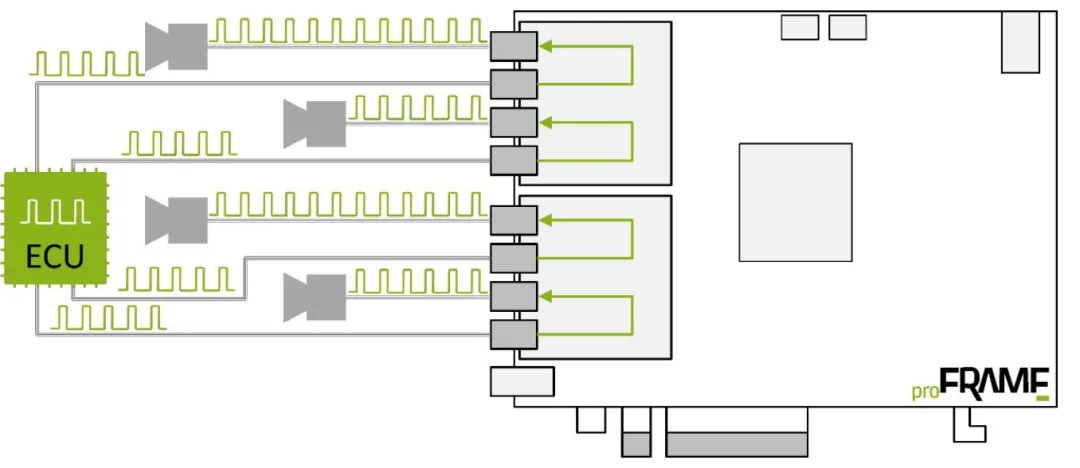
2. 相機脈衝信號觸發同步
部分相機支援內建脈衝信號(Trigger Pulse)輸出,可作為多相機同步的時脈源。當主相機輸出脈衝信號後,透過同軸電纜傳輸至 proFRAME FPGA,再由 FPGA 分送至其他相機,使所有相機在同一時刻啟動影像擷取,有效降低時間偏差。
3. 外部觸發訊號同步
proFRAME 板卡亦支援與其他感測器(如 LiDAR、毫米波雷達、IMU、GNSS 等)進行跨模組時間同步。外部設備傳來的觸發訊號可經由板卡分發至多顆相機,實現跨感測器的統一時間基準,確保異質感知資料在融合時保持高一致性。
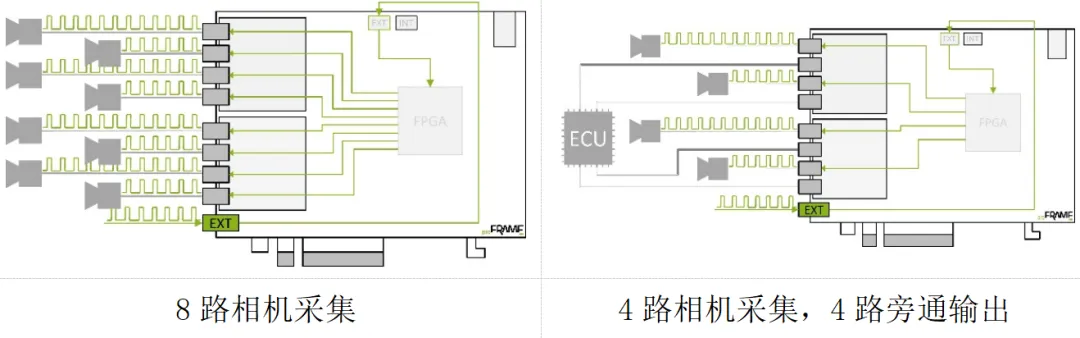
4. ECU 旁通觸發同步
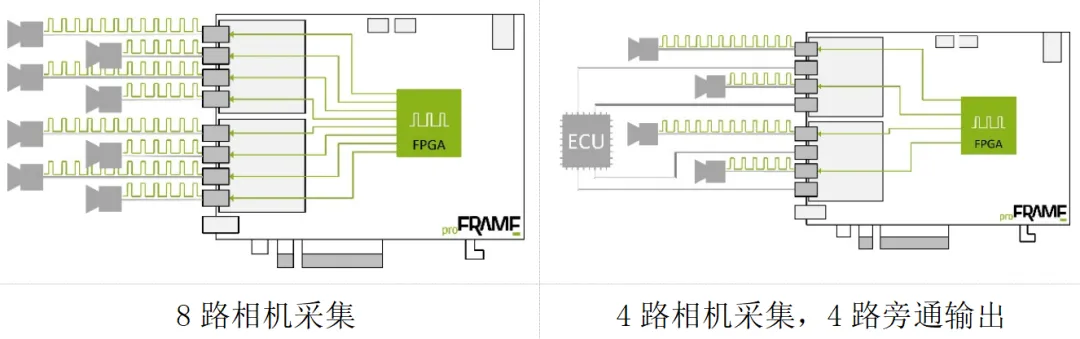
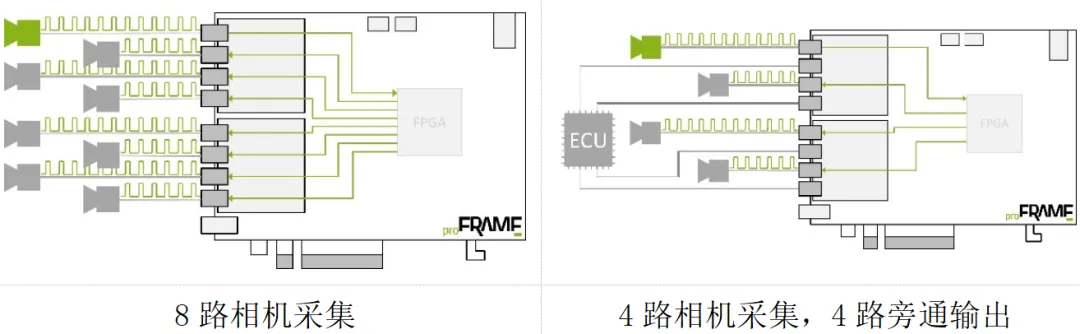
proFRAME 支援實時採集與旁通輸出模式(Bypass Mode),可同時將影像資料輸出至主機與 ECU/域控制器。
ECU 亦能透過反向控制通道傳回觸發時鐘信號,實現 ECU 與相機間的雙向時間同步,確保資料流(Video Stream)與控制訊號(I2C、GPIO)完全對齊。
5. 多板卡間時間同步
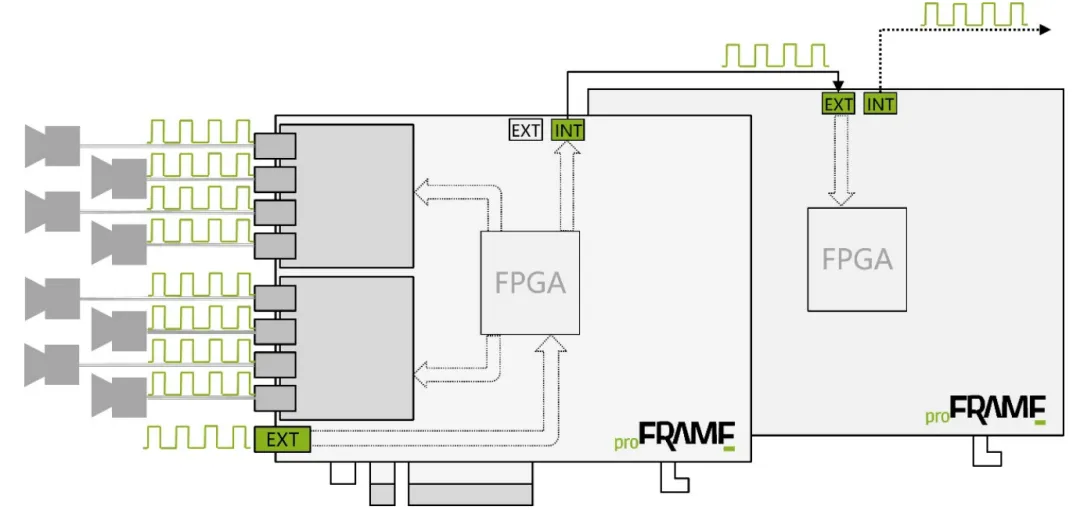
當影像系統需超過 8 顆相機時,proFRAME 支援多板卡聯動。板卡間透過 Internal/External Trigger Interface 共享 FPGA 時鐘訊號,可實現多板卡同步觸發,確保所有相機間的時間誤差維持在微秒等級。
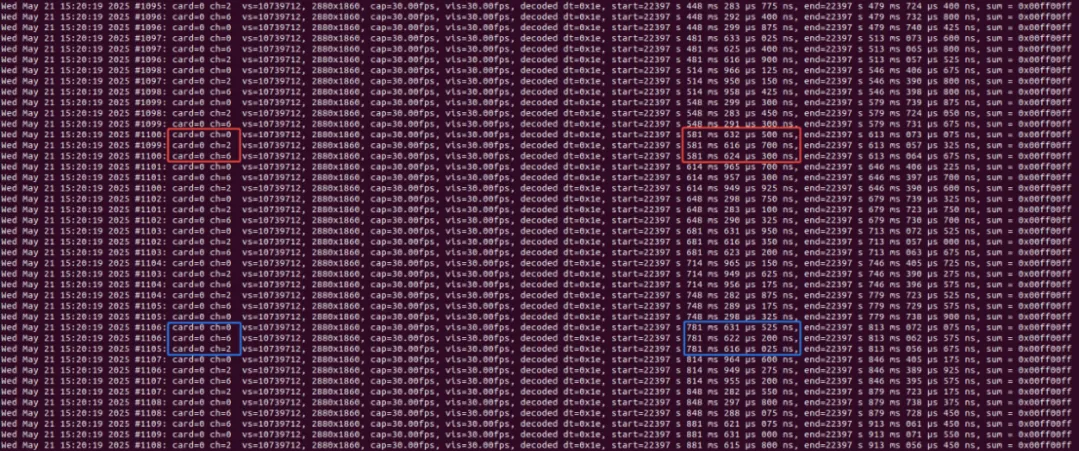
1. 三台相機時間同步與影像擷取測試
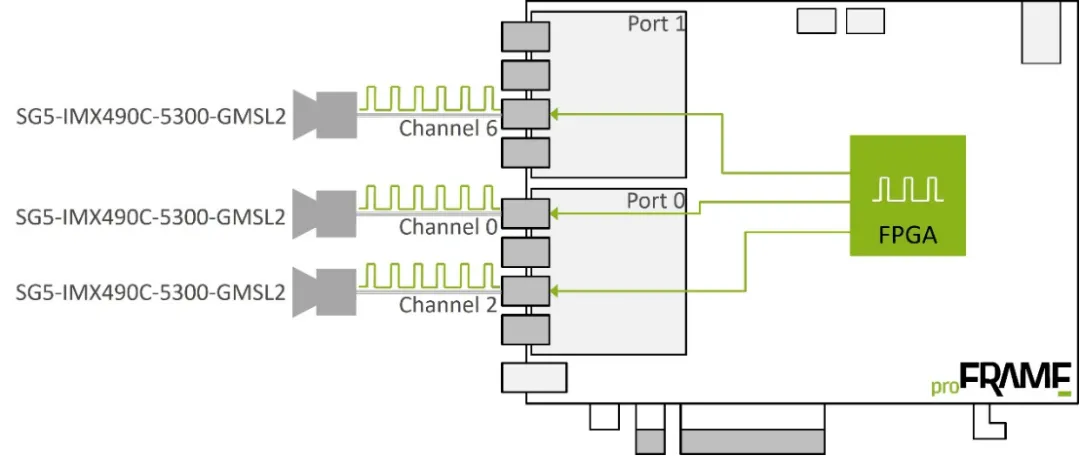
proFRAME 板卡 連接三台 森雲(Senyun)相機,型號為 SG5-IMX490C-5300-GMSL2(解析度 2880×1860,取樣速率 30fps)。系統透過板卡內建的 FPGA 時脈信號 進行觸發,同步三台相機的曝光與影像擷取過程。
- 測試結果如下:

透過 proFRAME 板卡對三台相機進行同步觸發與曝光啟動,成功擷取影像資料。
如圖中紅色與藍色框線所示(左側代表擷取通道,右側為當前影像幀的奈秒級時間戳),三台相機之間的時間同步誤差約為 15 微秒(μs),顯示整體同步精度極高,足以滿足多相機感知與影像融合的實驗需求。
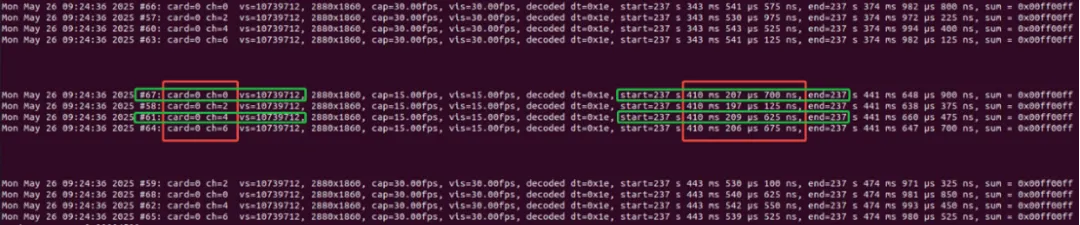
2. 三台相機同步與旁通影像採集測試
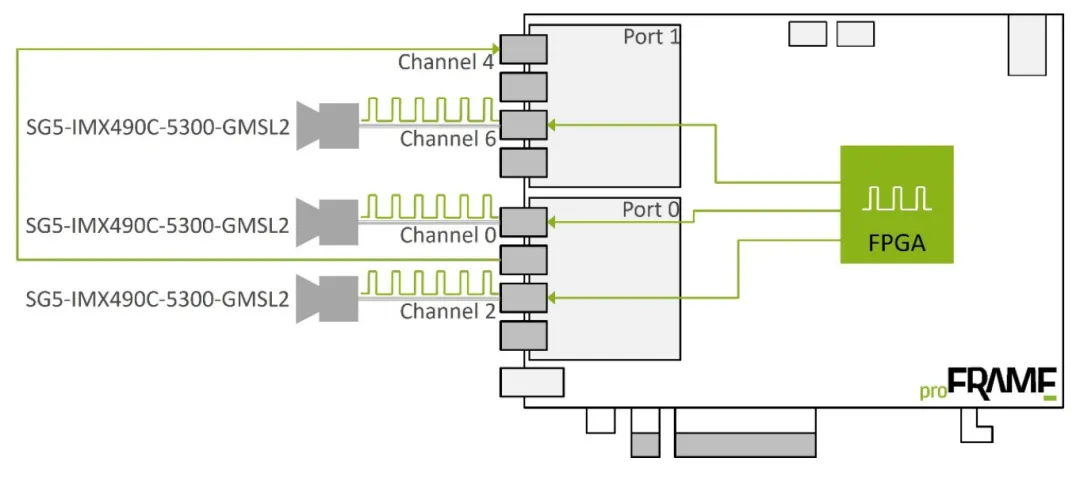
proFRAME 板卡連接三台森雲(Senyun)相機,型號為 SG5-IMX490C-5300-GMSL2(解析度 2880×1860,擷取速率 30 fps)。系統透過板卡內建 FPGA 時脈信號 觸發三台相機同步曝光與影像擷取。同時,將 Channel 0 的旁通輸出信號接入 Channel 4 通道進行採集,以驗證旁通資料的內容與時間延遲表現。
- 測試結果如下:透過 proFRAME 板卡觸發三台相機同步啟動曝光並擷取影像資料,如圖中紅框與藍框所示(左側為擷取通道,右側為影像幀的奈秒級時間戳),三台相機之間的同步誤差約為 15 微秒(μs),與前一項測試結果一致。其中,Channel 4 為 Channel 0 的旁通資料通道,如圖中綠框所示(左側為擷取通道,右側為影像幀的奈秒級時間戳)。旁通影像與原始影像之間的時間誤差約為 2 微秒(μs),顯示 proFRAME 在同步傳輸與旁通擷取中皆能保持高穩定度與極低延遲。
 想讓您的 ADAS 與多感測系統更高效嗎?
想讓您的 ADAS 與多感測系統更高效嗎?
宏虹proFRAME 模組化影像擷取與注入板卡提供可擴充的同步方案,協助研發團隊實現多相機微秒級對時與實時資料驗證,提升測試效率與系統穩定性。