作者: PicoAuto – Steve Smith
主要對於裝載在福斯E-Golf使用的三相永磁同步電機/發電機(MG)進行其運作進行研究探討,沿著典型的運作原理及電路特性提出一些問題,我想分享和討論這些問題這些問題與研究結果。
在我們開始進行之前,請記住安全、認證、訓練及系統知識都是缺一不可的,因為以下內容包含包含活電工作。
關於系統知識,以下自學課程(SSP-530 & SSP-527)是VAG對於裝載在E-Golf上的高電壓系統運行原理提供珍貴見解的說明。
備註: SSPs無法取代EV培訓
讓我從我所量測的電路概述開始。以下之波型畫面表示我們的E-Golf離開靜止狀態加速並藉由第三級的剎車動能回收減速(可供駕駛者選擇)達到停止。也就是說車輛能夠減速是藉由轉子承受負載導致,此時轉子為發電機的作用。(轉子經傳動系統與車輪連接)
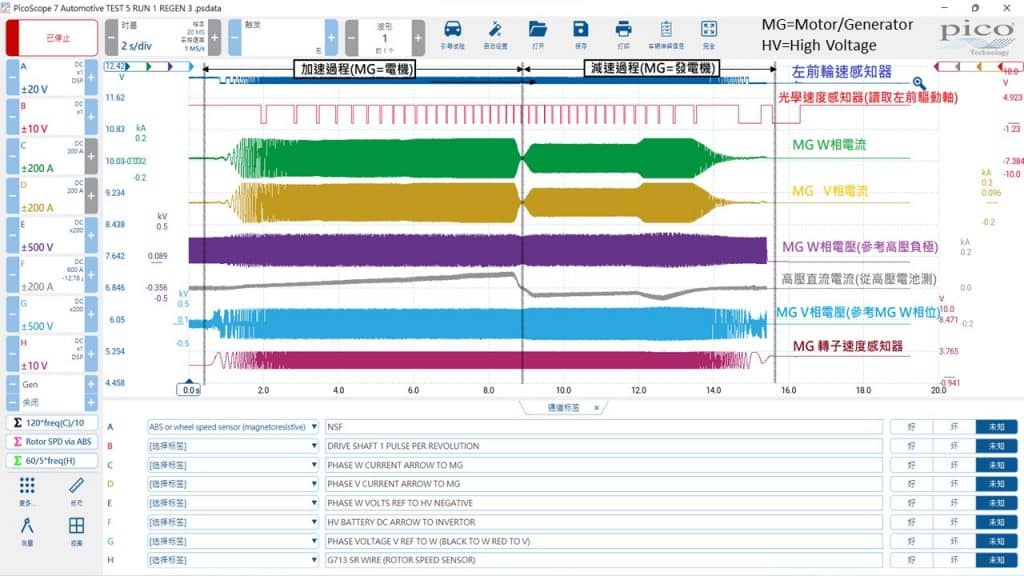
在以上的測試期間,我們有一個關於MG狀態切換的問題: 我們如何從捕獲到的數據判斷MG何時為電機或發電機運行狀態?
我想最簡單的答案就在通道F捕獲到的高壓電池直流電流波型。我們精確捕獲了高壓電池電流從正值(為電機供電)變為負值(MG轉為發電機回充電流)的轉折點。(見下文)
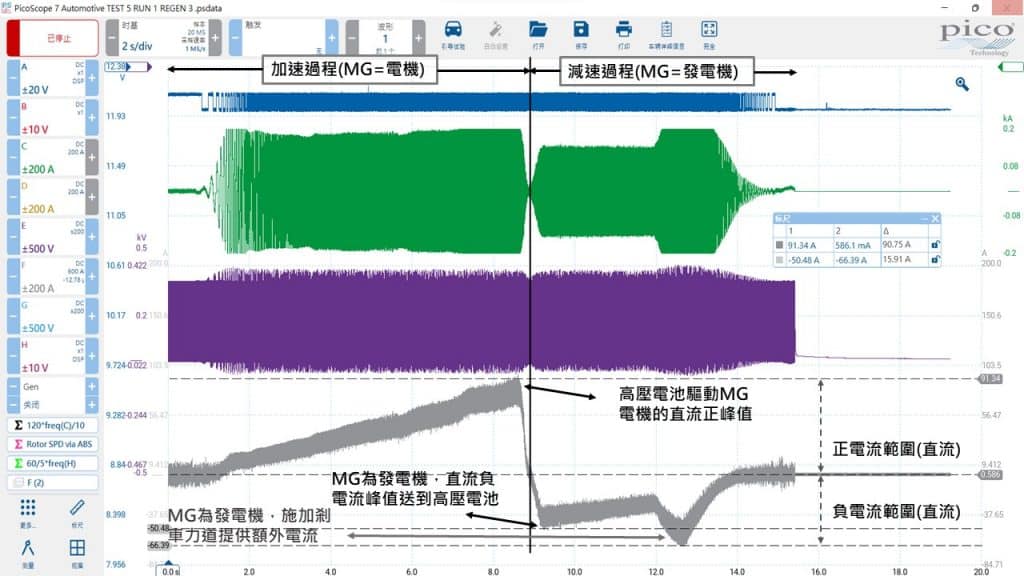
- 注意高壓電池直流正電流的峰值大約位置。上方截圖畫面顯示+91A。這用來提供電機馬達動力並驅動車輛。而在減速期間,由於MG此時為發電機,電流是反過來的,導致負峰值電流大約在-50A。在波型紀錄中約12.5秒時,另一個額外的-16A電流被傳輸到高壓電池(總和電流為-66.85A),這是由於剎車踏板的踩踏進一步降低轉子速度並產生額外的發電電流。
- 小提示:注意通道F的訊號測量標尺為4個而不是2個!
為了在一個波型上使用4個訊號測量標尺,你必須建立一個自動隱藏在你欲量測波型後方的參考波型。複製波型的好處是額外有2個標尺可供同一波型進行多重測量。有關參考波形的更多資訊,我建議您參閱PicoScope 此處及此處之資訊。
為了瞭解MG作為發電機時的性能,可以從上方PicoScope的資料數據和下面的理論更深入探討三向永磁同步電機的運作特性。
以下論壇貼文中討論了關於三相無刷直流電機(為了有更好的概述),這正是我們在車輛中有的問題討論。與其我試圖解釋三相無刷直流電機的功能,不如看這裡的精彩動畫。請注意,在動畫中,轉子位於定子外側。 而 EV 應用中,轉子放置在定子內部並最終與車輪連接。
總結以上動畫中描述的運行,我們的 MG 定子中會產生一個旋轉磁場 (RMF),簡稱為”電子換向”或“EC”。RMF 的速度藉由 PWM 控制信號的多個功率電晶體精確控制開關。高壓直流電流的精確開關控制(PWM控制)也造成了三相高壓交流電流之產生。
- 以下影片更詳細地介紹直流到交流的轉換原理。Inverters, How do they work ? – YouTube
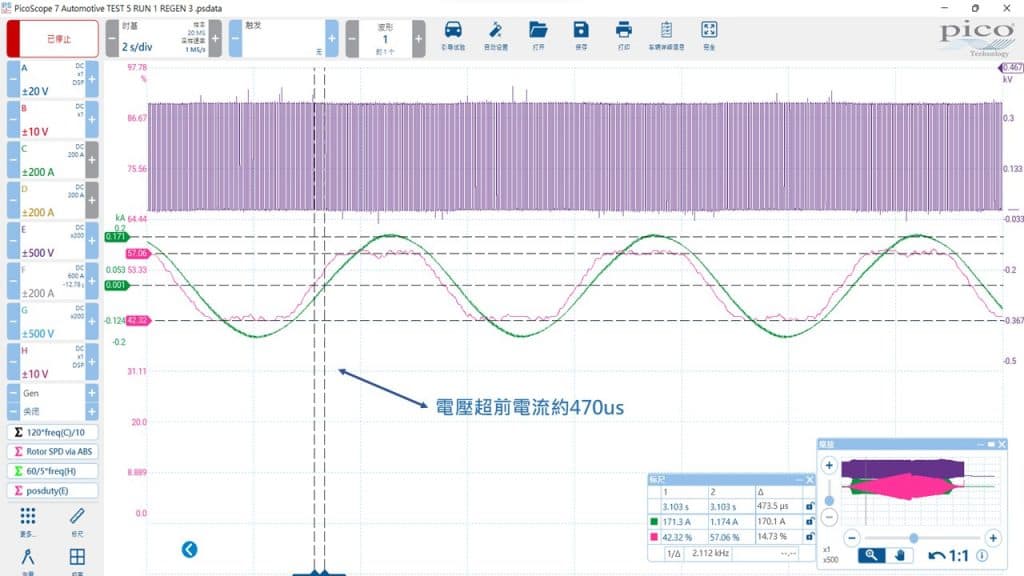
藉由使用下圖中通道 E 的正佔空比波型,我們可以看到我們其中一個 MG 相位(W 相位)的高壓如何被控制用以產生交流電流的。
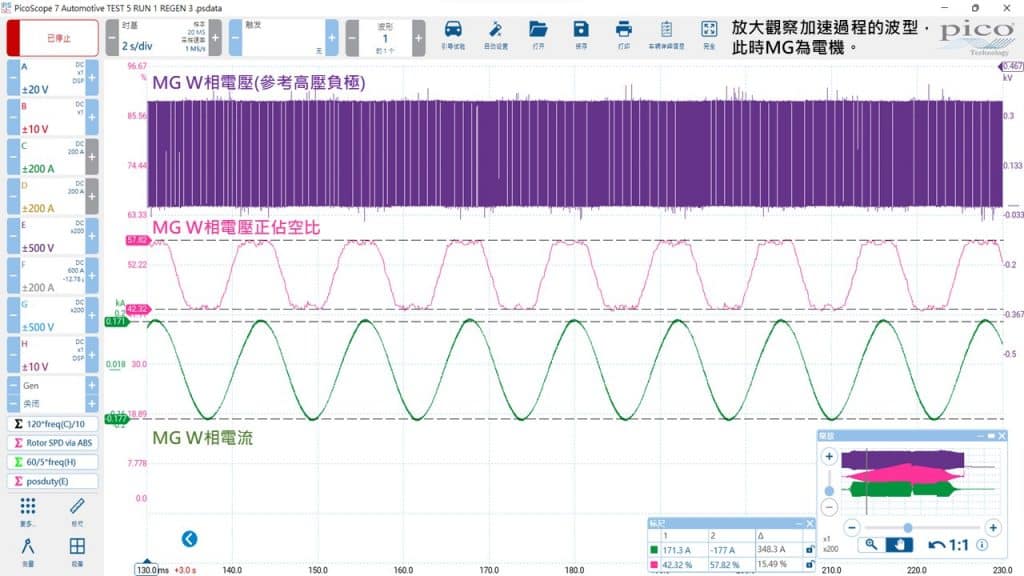
- 請注意,以上的數學通道“posduty(E)”顯示了 MG W 相電壓的峰值正佔空比控制(約 58%)對應到流經相位繞組的峰值正電流(約 171 A)。 同樣,我們較低的正佔空比(42%)對應到我們的峰值負電流 -177 A 相近。
- 請注意,下面畫面截圖中的正佔空比數學通道也顯示了電壓如何領先超前於電流(約 470 µs),這是典型的電感特徵,並凸顯了線圈(W 相)由於感抗產生而與交流電流相反的固有特性。
現在我們有了 RMF(其轉速稱為同步速度),我們現在可以藉由定子的感應磁場與永磁轉子的交互作用來作用啟動轉子的旋轉。若要再次參閱請點及上方動畫和影片連結。
同步電機內的轉子之理論速度應該與定子的RMF完全相同。(畢竟這是一台同步電機) 我們可以使用數學和下面的公式來證明這個理論,並發現關於 MG 狀態的線索。它是根據轉子速度決定擔任電動機還是擔任發電機嗎?那我們該如何計算RMF及轉子速度?
讓我們從RMF速度計算開始。
我們可以使用以下公式: 120*Freq(C) / Number of poles
- 120代表我們的三相中每個相位相距的角度(120°)
- Frequency (C)代表通過相位的交流電流的頻率。
- Number of poles代表磁鐵的數量X2以得出極數(每一個磁鐵都有北極與南極)
再次參閱我們的SSPs後,它表示轉子有5對磁組(10個磁極),我認為定子也是如此!
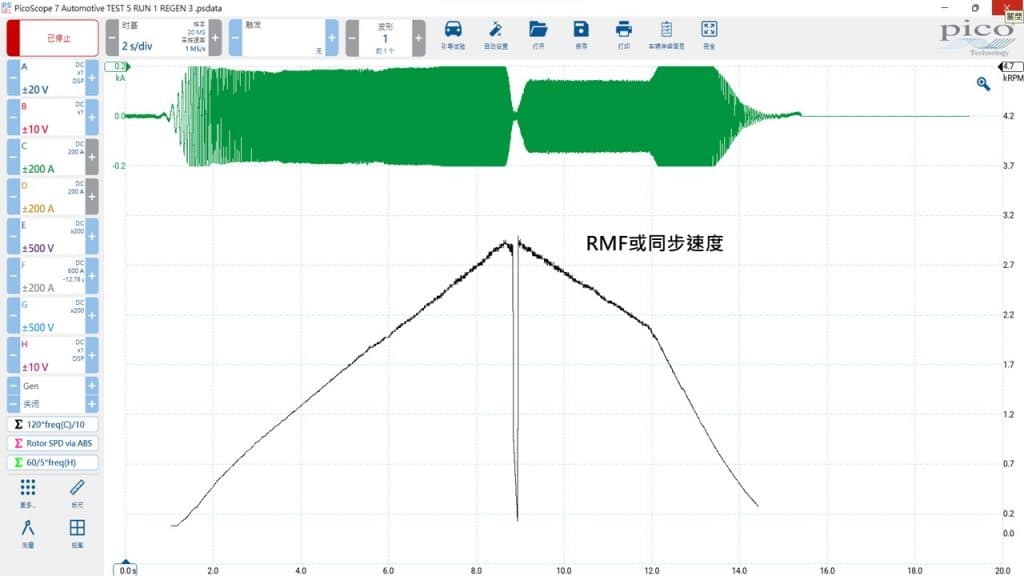
在下方畫面我們使用數學通道“120*freq(C)/10”來顯示出我們的RMF速度(同步速度)。
我們有幾種選擇來定義轉子速度,而我一開始選擇用輪速乘上傳動比。
這就是我們的光學拾取器(通道B上)瞄準到左驅動軸的一塊反光帶之處,它會在車輪每轉一圈時產生一個脈衝。為了提高分辨率與精準率,我在通道A增加了左驅動輪的輪速感知器訊號。藉由來自驅動輪的單一脈衝,我們現在可以計算輪速感知器相對於車輪轉動一圈的脈衝數,我們以前使用過這種技術,您可以在此閱讀有關它的資訊。
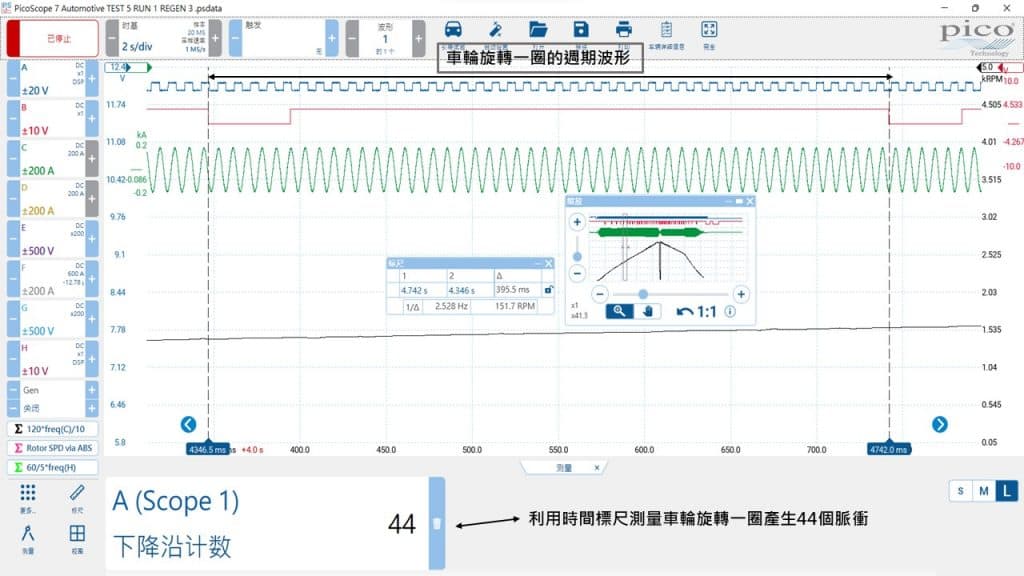
- 藉由使用PicoScope 7 Automotive中的“下降邊緣計數”測量功能(在上方畫面截圖中的時間標尺之間),我們可以結論ABS輪速感知器在每圈旋轉時拾取44個脈衝。
因為我們知道E-Golf的傳動系統包含2.704:1的單齒輪比與3.608的最終傳動比,我們統計全部的齒輪比等於2.704 x 3.608 = 9.756 :1
我們現在可以藉由以下數學通道計算轉子轉速: (60/44*freq(A)/60)*9.756*60
- 60/44*freq(A)表示輪胎的RPM,因為輪速感知器在每一轉有44個脈衝。
- /60代表將RPM轉換成頻率(Hz)
- *9.756 代表透過傳動比回算轉子的頻率
- *60 代表將轉子頻率轉換成RPM
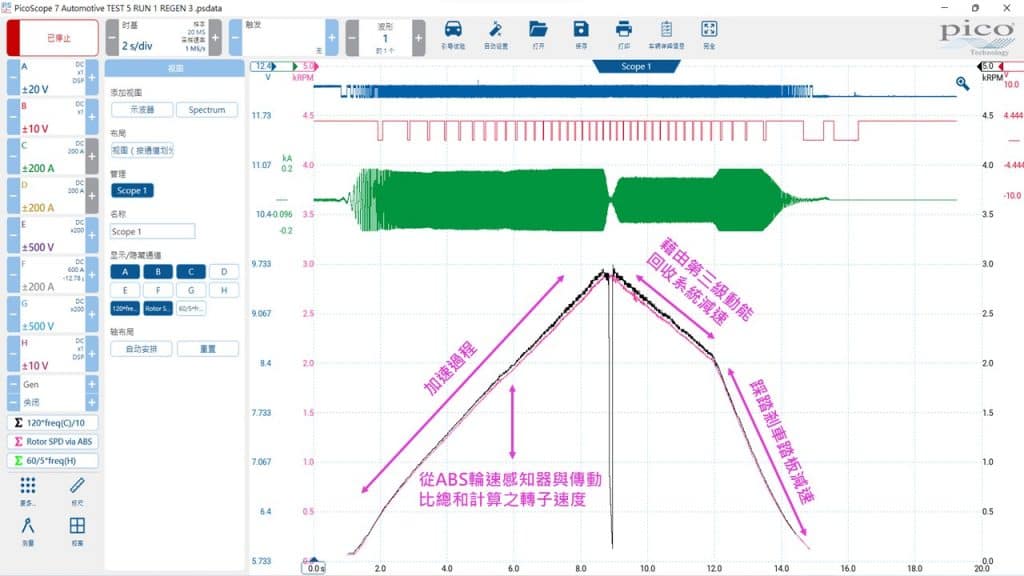
可以看到上圖的畫面波型,我們從ABS輪速感知器與總齒輪比計算的轉子速度明顯低於同步速度! 這與同步電機的特性形成反差並顯示了我們用此方式計算轉子速度需要考量此變數。通常此變數包含整體傳動系統的公差累積與轉向誤差等等。
另一個測量轉子速度方式是使用集成式的轉子速度感知器(VAG將其稱為”G713”)。為此我們必須確定轉子速度感知器相應於轉子轉一圈時的電循環數,但如何確定?
這需要了解在SSPs530和527中描述的轉子磁極數的知識,在此情況向如我先前提到的是十個,並將極數除以2來確定轉子轉一圈的電循環數,但為什麼是除以2?
這十個轉子磁極交替排列:北極,南極,北極,南極……。當每個磁極被速度感知器偵測(例如一個北極),它產生一個電壓輸出到個別的方向,造成我們一半的正弦波型。當下一個交替的磁極(例如一個南極)被速度感知器偵測時,它產生一個相反方向的電壓輸出,造成另一半的正弦波型產生並完成一次電循環。因此每一個完整的電循環都必須藉由轉子感知器通過兩個交替磁極來產生。
因此,轉子每一轉的電循環數會等於轉子磁極數除以二(10)/2=5
下圖的波型能幫助理解上方的敘述。注意,對這台車輛,轉子速度感知器的電循環與轉子總成是一致的。
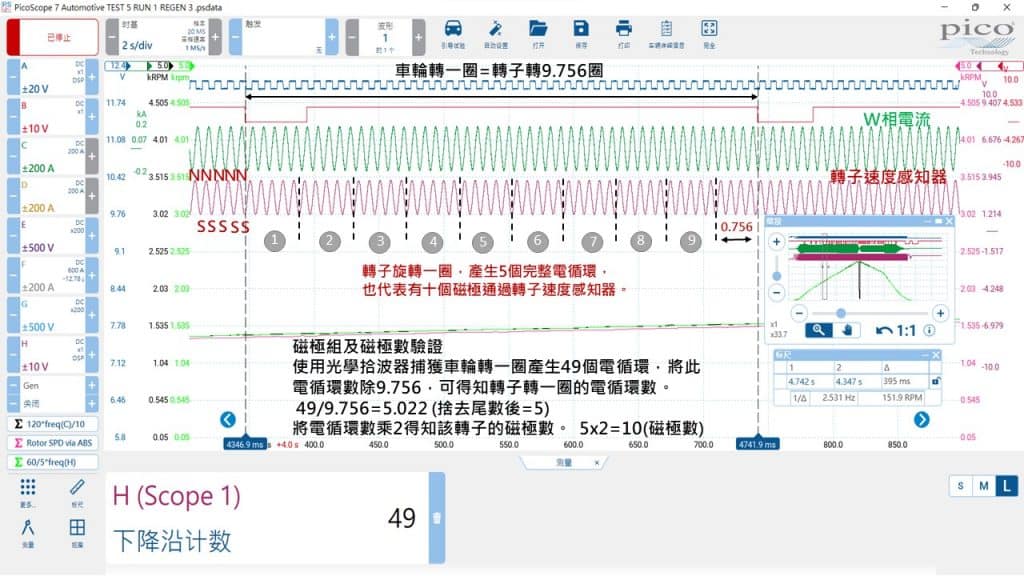
- 基於上述所說:如果我們知道轉子的磁極數,我們可以使用該公式: 60/5*freq(H)。通道H是連接轉子速度感知器。
我想我們都能認同上方數學通道的綠色波型,我們的轉子速度在加減速的期間確實等於我們的RMF速度。我們現在已經確定這個電機確實是同步電機。
繪製所有轉速和負載範圍內的RMF與轉子速度(使用同步MG)將在談論到逆變器性能評估、定子完整性、轉子平衡與傳動系統狀況時提供珍貴的資料數據。
在這裡我們正找尋在兩個數學通道間的一致性與同步性,任何〝丟失〞或循環誤差都將明顯影響關注的區域。關於循環誤差參閱Ben’s的“Martins’ Method”文章。
如果這是一個感應異步電機,在加速期間RMF速度將高於轉子速度,但在減速期間會低於轉子速度(一種稱為〝滑差〞的現象)。這個現象與特性可以被用來做為感應異步電機MG狀態的指示(電機狀態或發電機狀態),但這並不適用於我們的同步電機。
讓我們拉回原先的問題:”我們如何從捕獲到的信息判斷MG現在是以電機運行還是發電機運行?” 假設你在高壓電池端的直流電纜沒有接電流鉗(上圖2)且你正在量測帶電流的單相電壓(參考高壓負極),那可以用〝相位〞來判斷。
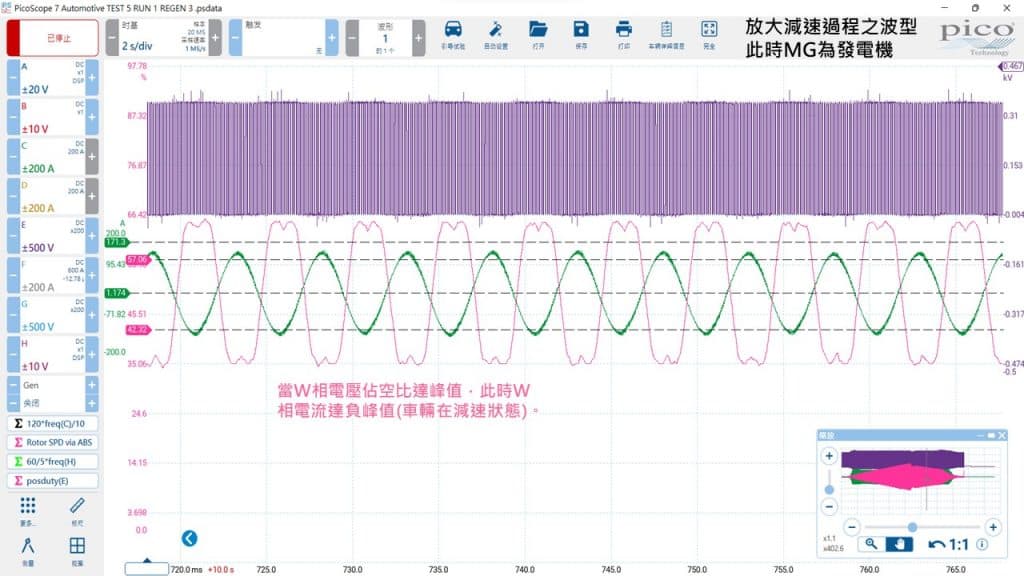
注意下面畫面截圖中的相電壓與電流的正佔空比兩者間的關係,對比上圖3.4。

- 注意,數學通道“posduty(E)”顯示MG相位W電壓(約64%)的正佔空比峰值控制為何與流經相位繞組的負電流峰值(約 -143 A)相應。相同的,我們的較低正佔空比35%對應到我們的電流峰值136A。
這與我們的MG作為電機時的佔空比情況完全相反,他們的相位已經偏移了約180°!
在以下的波型介紹了用相位標尺將360°的轉子旋轉分成五個區域,每一個磁極相距72°,我們可以清楚看到相電壓和電流在正佔空比之間的相位變化。
- 由於我們的相位繞組電壓與電流的正佔空比之間的關係(相位)顯示了MG(電機與發電機)的運行狀態,如果我們可以簡單繪製相位移動而不是放大每個部分並量測相位,那就更好了。感謝我的同事Martyn準備的數學通道。
LowPass(Duty(((((atan(1/tan(pi*((posduty(E)-50)/10000)))/pi)+((posduty(E)-50)/10000))*-((atan(1/tan(pi*(C/10000)))/pi)+(C/10000)))+0.25))/0.555555555,10)
我沒有打算解釋上述公式,它包含了一些低通濾波器、三角函數、正負載計算。
不幸的是當這項數學通道套用到上方的捕獲數據後,由於通道C的錯誤它並沒有成功繪製出資料。眼尖的人會發現,在加減速過程中,會有電流超過 200 A 的“超出範圍”情況。在此情況下,數學通道無法執行計算且導致數值無限大而無法繪製資料。
在對E-Golf的類似測試進行搜尋時,“TEST 8”有另一個加減速事件的所有的相電流都在範圍內且額外增加高壓電池直流電壓的效益。(注意減速期間的增加)
現在調整數學通道,我們正在查看通道A(相位繞組U的電壓正佔空比)與通道D(相位繞組U的電流)相位: LowPass(Duty(((((atan(1/tan(pi*((posduty(A)-50)/10000)))/pi)+((posduty(A)-50)/10000))*-((atan(1/tan(pi*(D/10000)))/pi)+(D/10000)))+0.25))/0.555555555,10)
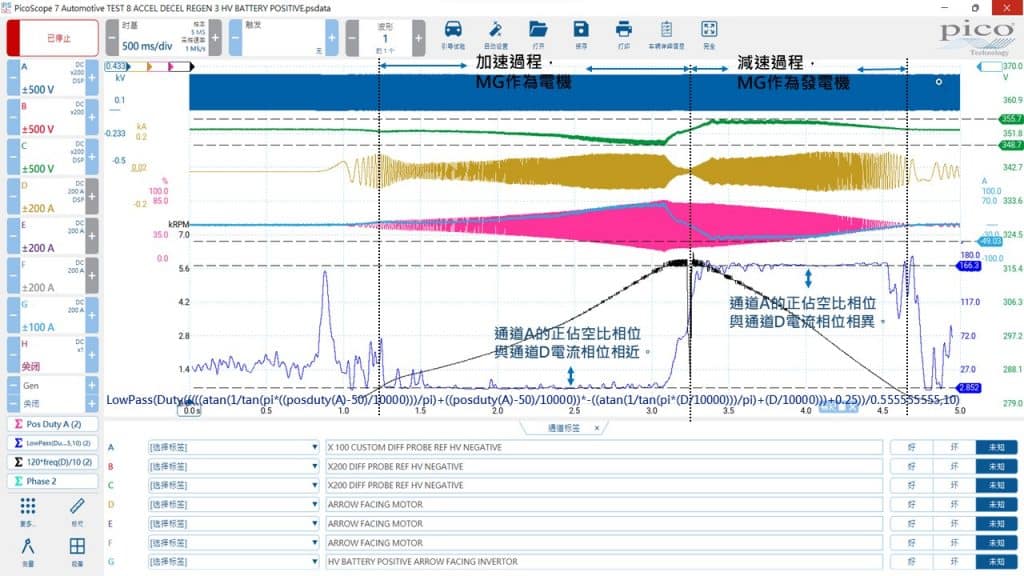
- 在以上畫面截圖可以看出相位繞組U的電壓正佔空比(參考高壓負極)與相位繞組U的電流之間的相位移動來判斷我們MG的狀態。
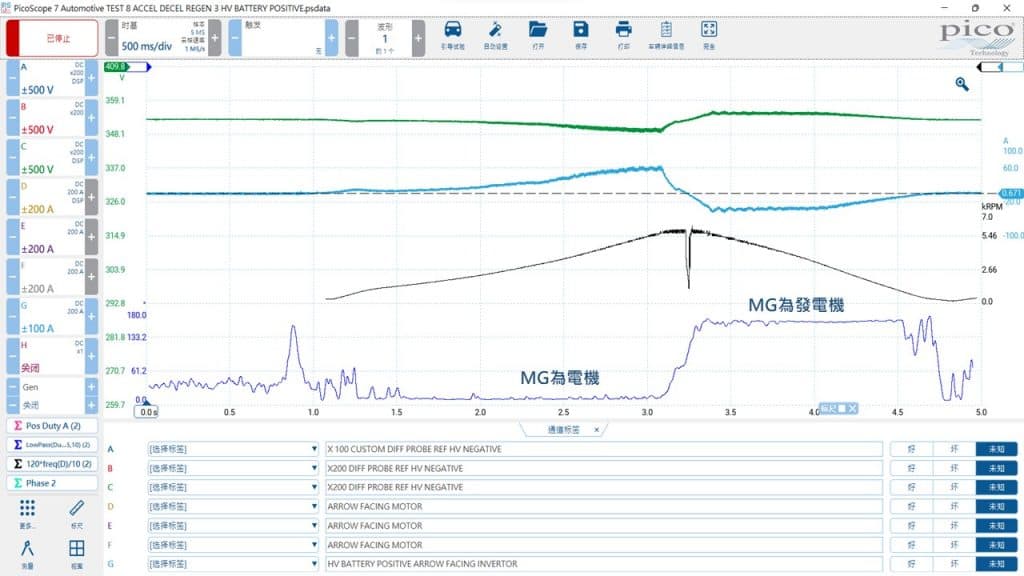
- 在以下畫面截圖中,我隱藏了一些波形並移除一些標尺來更清楚顯示相位移動之值。
我希望這有幫助,隨著我們之後深入探討感應異步電機後將會比較相關的研究結果及更多的文章內容,我們有很多可以一起學習討論。