前言

在海洋監測領域,基於無人艇能够實現高效、即時、自動化的海洋數據採集,從而為海洋環境保護、資源開發等提供有力支持。其中,無人艇的控制演算法訓練往往需要大量高品質的數據支援。然而,海洋數據採集也面臨數據雜訊和誤差、數據融合與協同和複雜海洋環境適應等諸多挑戰,制約著無人艇技術的發展。
針對這些挑戰,宏虹探索並推出一套基於多感測器融合的海洋數據採集系統,能够高效地採集和處理海洋環境中的多維度數據,為無人艇的自主航行和控制演算法訓練提供高品質的數據支援。該系統已成功交付給客戶並實際投入應用。
方案架構
無人艇要在複雜的海上环境中實現自主導航,尤其是完成障礙物檢測和追蹤任務,其關鍵在於對海面環境的高效感知。因此,透過整合多種感測器,包括相機、雷射雷達、IMU(慣性測量單元)和GPS(全球定位系統),能够採集更全面、更精確的海洋環境數據。但這種系統也會進一步涉及時間同步、 數據傳輸與儲存以及環境適應性等問題。
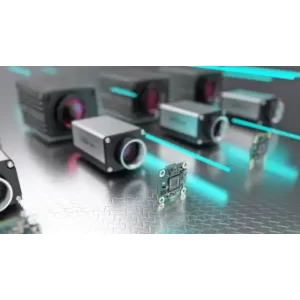
基於以上考慮,採用BRICKplus(工控機)+ETH6000+感測器套件(6\*iDS相機+1\*LiDAR+1\*IMU+1\*GPS)方案架構,如下圖所示:

方案架構
基於BRICKplus+ETH6000構建的數據採集平台,提供12個乙太網路端口(10\*1Gb+2\*10Gb)可以有效接入各個感測器,並為後續升級技術架構、接入更多感測器預留更多空間。多感測器產生的數據量巨大,對數據傳輸和儲存提出了高要求,特別是8MP相機6個同時採集。
採用BRICKplus提供大容量(8/16/32TB)高速寫入(16Gbit/s)儲存硬碟,能够高效穩定地儲存感測器數據。採用GPS模組,支援(g)PTP時間同步與定位。
系統搭建
為了更好地感知無人艇周邊環境資訊,對感測器分布和方式進行了設計和調整,布局如下圖所示。該布局可以更有效地應對海面複雜環境下的數據採集。

系統搭建
數據採集
在面向無人艇數據採集時,需要使感測器套件(四類感測器)能够同時採集數據,並具備時間同步、即時可視化、儲存和回放等能力。整體軟體架構採用ROS+感測器整合方式,支援即插即用,使用便捷。
例如在iDS相機採集鏈路上,涉及多相機同步採集的實現難度大、圖像數據的即時傳輸和儲存需求高和動態參數調整的靈活性不足等問題。透過量身訂製開發,採用ROS+PEAK SDK方案進行深度整合,實現了多相機同步採集、即時可視化、動態參數調整等功能,靈活適應海面複雜的採集環境,提高了系統的通用性。

數據採集1

數據採集2

數據採集3
總結
在海洋監測和無人艇控制領域,數據採集的準確性和可靠性至關重要。宏虹的基於多感測器融合的海洋數據採集系統方案,利用高性能的BRICKplus+ETH6000模組作為中央處理單元,连接多個感測器,能够實現高速數據傳輸和同步。
該系統採用ROS框架與感測器SDK進行量身訂製開發,實現了多執行緒數據採集、處理和發布。同時支援配置檔案動態載入感測器參數,支援即時調整和優化,進而顯著提高了數據採集的同步性、即時性和可靠性,為無人艇的自主航行和控制演算法訓練提供了高品質的數據支援。
了解更多產品資訊

BRICKplus 高性能自動駕駛資料獲取與記錄平臺
- 高性能:PCIe 3.0 架構,16 GBit/s 高頻寬記錄,32GB RAM,四核處理器,整合GPU。
- 時間同步:XTSS時間同步系統,支援IEEE 1588v2 802.1AS-2020,多域時間同步,整合硬體時間同步乙太網端口。
- 擴展性和可靠性:模組化系統,BRICK STORAGE,基於RAID或NVMe的高性能大型存放區,專為惡劣環境設計。

PSB 精準同步盒 – 高精度時間同步與高速多介面傳輸方案
- 高精度時間同步:支援IEEE1588v2 (PTP) 和 802.1AS-2020 (gPTP) 時間同步協定,精度最高可達100納秒。
- 相容各作業系統:採用4個10GBASE-T介面,能夠與不同系統環境無縫整合。
- 高效同步時間源:可與最多4塊QX550板卡同步,支援16個介面。
如果您對此感興趣,歡迎您關注我們獲取更多文章資訊,如有任何問題,也歡迎聯絡我們!