一、案例背景
馬士基碼頭公司(APM Terminals)每年處理高達 5000 萬噸的貨物,在龐大貨運的壓力下, Zeebrugge 使用一種被稱為「跨載機」的機器以滿足貨物運輸,正如其名,跨載機最多可堆疊四個堆棧,操作員坐在上面可以看到整體情況。當跨載機在碼頭周圍移動,中央管理單位很難了解每台設備的狀態,包括油耗、油位、電池電壓的數值,以及跨載機的載運情況等,而更重要的是—它在哪個位置? APM 若想要追蹤跨載機的動態,則需要在跨載機和辦公室之間安裝一個無線系統進行通訊。問題是 APM 在內部使用基於 CAN 的總線,該總線無法與將數據發送到辦公室的基於 Modbus-TCP 的監控系統通訊。
二、解決方案
APM 找到了一家系統整合商,該系統整合商擅長解決不同 PLC 系統和工業設備之間的通訊問題。他們找到了Anybus X-Gateway網關作為有效的解決方案。
“經過三個月的測試,我們發現Anybus 非常容易使用,此外,Anybus 的真正優勢是Communicator 可以重複配置,意味著透過只需更改地址,我們就可以立即移植新的 Communicator 在另一個跨載機上。”
APM 終端控制工程師
APM 相信 Anybus Communicator CAN 非常適合處理 22 個跨載機中基於 CAN 的網路和 ModbusTCP 網路之間的轉換。 Anybus Communicator CAN 透過預載的軟硬體配置工具,有效連接跨載機基於的 CAN 總線和Modbus TCP之間的網路轉換。

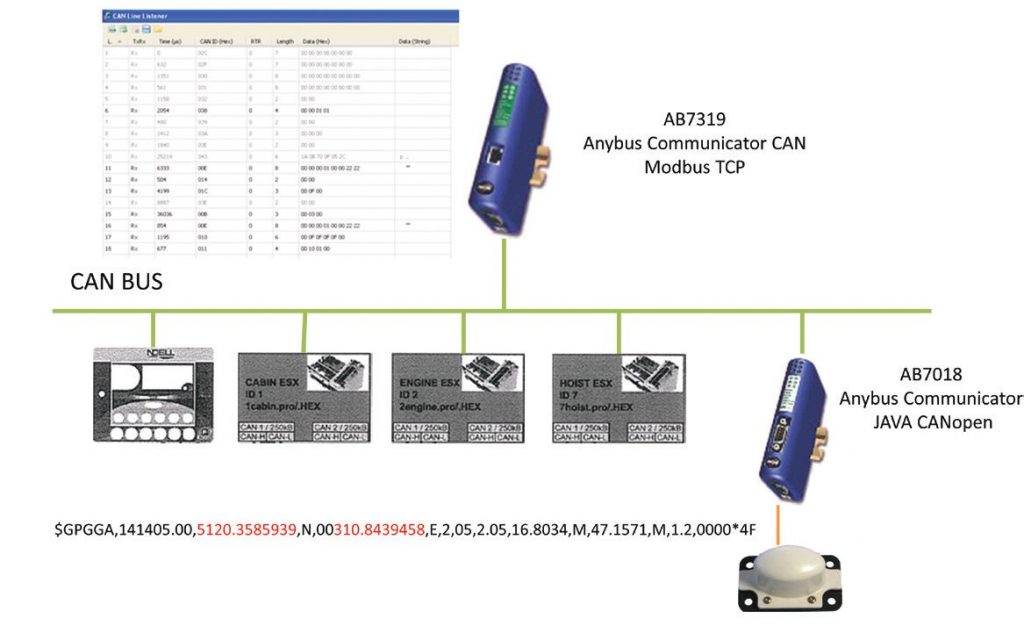

Anybus 預載Configuration Manager進行配置,該配置軟體係基於 Windows ,APM 公司可以準確指定報文應該如何傳遞。 安裝 Anybus Communicator只需要在幾天內花個一兩個小時,就可以讓 22 台跨載機與中央監控系統溝通。另外,Anybus Communicator 出色的地方在於它的靈活配置性,我們可以配置調整所需的參數,而Anybus Communicator CAN 支持 11 位和 29 位標識符也是成功的關鍵之一。”
另一個需要解決的問題是 GPS 追蹤器使用的是基於RS232的NMEA 0183 協議,無法與 CAN 總線通訊。 Anybus 網關同樣可以提供這類解決方案。借助Anybus Communicator – CANopen(AB7003),就可以連接基於CAN 系統的跨載機和基於 NMEA 0183 的 GPS 系統。APM 現在可以有效監控所有跨載機的狀況,包括燃油狀態、準確位置、 風況等。更重要的是,該系統允許APM 的維護團隊隨時掌握安全狀態,並事先知道他們需要對每台跨載機做什麼動作,有效節省大量時間和降低事故風險。