
GNSS的優點與應用
目前GNSS技術已經成為日常生活不可或缺的一部分,幾乎覆蓋各行各業,包括軍事、農業、交通等。簡單來講,它的應用可以分成:
- 定位與導航:良好的GNSS地理定位服務的準確性、完整性、連續性和可用性為地理定位與導航帶來越來越便捷、高效、準確的性能,在交通領域的使用實現增長和多樣化,可應用於道路交通與鐵路、智慧與自動駕駛,航空航太,海運與物流等。
- 授時:GNSS技術在該領域具有巨大突破,降低了專用物理通道搭建成本,實施簡單,並且有著令人滿意的精度,GNSS網路已成為網路運營商傳播公共時間源的重要、全球化和標準化手段。
- 追蹤
- 製圖

GNSS追蹤、製圖
而在新應用領域,隨著智慧城市與自動駕駛等新興技術的不斷發展,對高精度衛星導航定位服務的需求逐漸提升,衛星導航應用市場也將隨之進一步擴大。
GNSS測試方法
GNSS終端數量正在急劇上升,應用領域與種類也越來越多,隨之而來的問題就是測試場景越發龐大與複雜。近些年來,針對汽車與相關行業提出了HIL(硬體在環模擬)測試方法,並慢慢嵌入到整車測試系統中去,與其他功能、設備等完成協調測試。
GNSS測試的手段中目前主流的測試方法有三種:
1. 借助真實環境(Live Sky)這是最原始也是最簡單的測試方法,利用真實環境中的GNSS網路直接進行設備測試,只需具備待測設備和天線即可完成。測試的網路是最真實的,但同時也存在很多問題。
首先,GNSS網路很微弱,在室內近乎於無,因此如果想在室內測試則需要很麻煩的佈線與連接,並且也很難在室內進行移動測試;其次,真實天空中的GNSS網路的時間也是真實的,這也意味著每一時刻的測試結果是唯一的,很難進行重現與還原,這對於測試本身來講就存在著無法控制、無法複現、無現重複批量測試的問題。另外,此類方法也無法去測試和模擬一些理論開發中的GNSS網路與系統。
2. 錄製GNSS網路並重播(RF Rocord/Playback)錄製重播是對真實環境測試的一種進步與加強,將GNSS網路在真實環境中錄製之後即可透過專門的設備重複重播,並針對網路的強度做一定的調節。因此在一次外場測試後,其他時候都可以在室內透過重播的方式來完成測試,既保證了網路的真實性,又給予了網路測試的重複性與部分可調性。
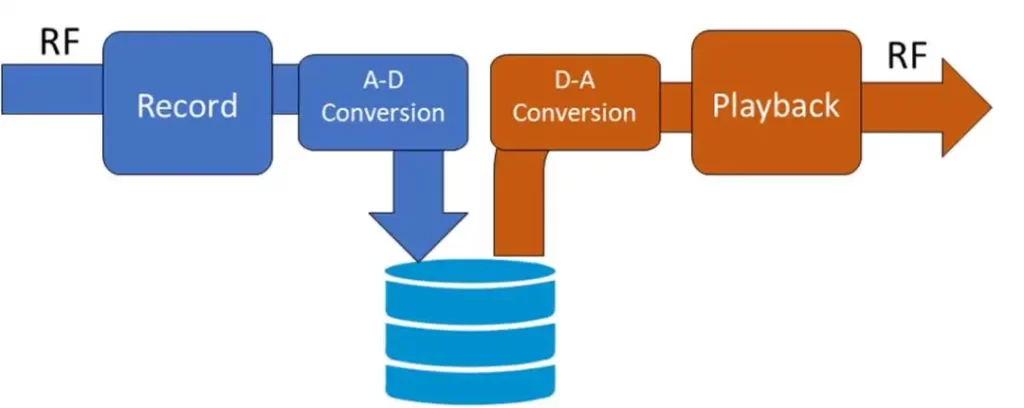
錄製GNSS網路並重播(RF Rocord/Playback)
RF錄製重播提供了可重複的測試,但在測試接收機方面用處有限。它本身不允許動態修改場景,也無法進行時間與位置的變化,缺乏靈活性。此外,錄製重播經過AD/DA轉換,受限於硬體性能,精度較差,通常只有真實模擬的25%,而且受錄製接收器的限制,需要大量記憶體(GBs量級乃至TB),以及超高性能的配套PC。
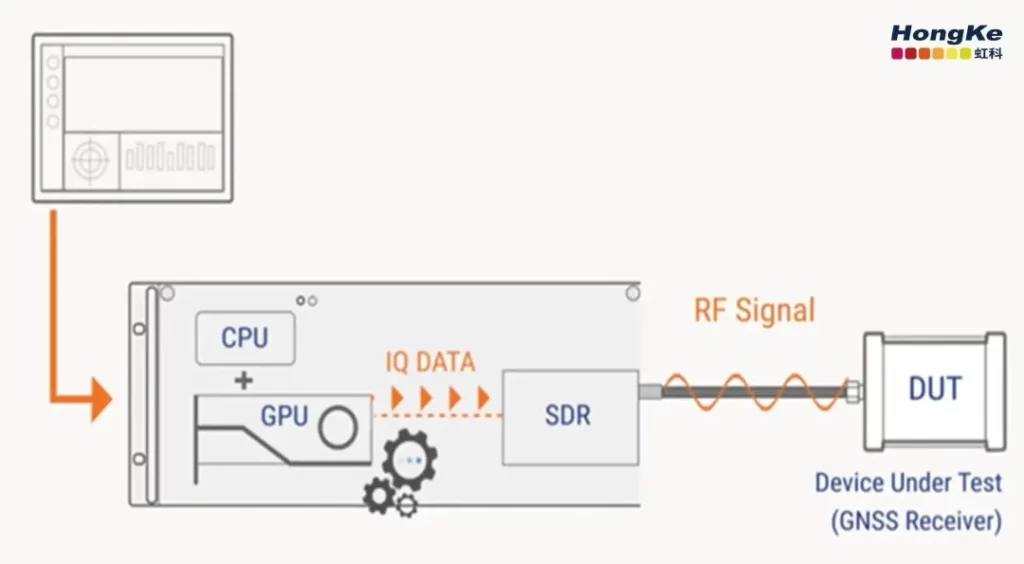
3. 借助軟體或硬體完成GNSS網路模擬與測試(Simulation)
GNSS模擬是目前最為先進的GNSS網路測試方法,它透過軟體或硬體直接模擬所需的GNSS網路,近乎即時與無損的傳輸最真實的GNSS網路,相比前兩種方式,它的實現不依賴真實天空網路,而是星曆與修正計算完成網路的輸出。因此這種方法具備非常明顯的優勢,測試網路可以自由編輯與修改時間、地點、網路強度等資訊,無需在室外按照實際路徑驅車或行走錄製,並且可以重複測試。此外,它也可以根據相應的檔直接生成RF網路,無需依託現有星座架構,對於未來網路的研發和測試有非常大的優勢。
GNSS模擬的方式因為是依託設備模擬而實現的,所以精度更高,延遲更小,並且完全不需要室外的測試與錄製,大大的降低了外場測試的難度與風險。

GNSS網路模擬與測試(Simulation)
GNSS測試場景與解決方案
目前GNSS測試一方面主要是各類接收機本身的測試專案會用到,例如定位時間測試、捕獲時間測試、接收機靈敏度測試、觸發精度測試等。這類測試結構簡單,實現容易。
此外,伴隨著自動駕駛與相關行業的發展,針對高精度定位的測試也逐漸增多,包括V2X、車輛導航、車內娛樂系統測試等,這部分測試大部分都需要在真實環境中聯調測試,無法進行單個模組的性能測試,因此HIL(hardware in loop)硬體在環模擬測試方法逐漸成為主流,而這也對測試的需求、架構、精度等提出了更高的要求。

GNSS測試場景與解決方案
在GNSS模擬的現有優勢上,此類基於SDA(軟體定義架構)的模擬方案具有獨特的優勢,這在HIL測試中則體現的更加明顯。
1. 提供對HIL測試的高度整合性與開放性
軟體是基於SDA的GNSS模擬器的基石與支柱,對外的連接與介面都可以針對軟體來完成。以宏虹Safran Skydel模擬引擎為例,它是基於Linux開發的,支援Python、C#、C++、Labview等多種語言,使用者可以直接透過程式設計的方式對設備進行控制與連接,大大提高了HIL系統的構建效率與緊密性。
此外Skydel支援外部控制項API,可以在HIL模擬器的前端直接調用Skydel,實現HIL系統一體化。
在HIL模擬器的前端直接調用Skydel
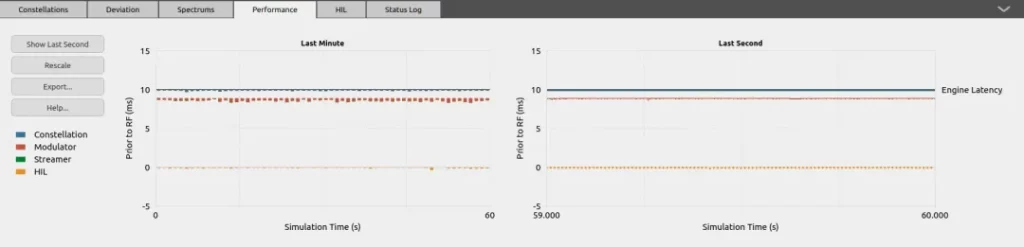
2. 極低的延遲與視覺化的調教系統
HIL(Hardware-in-the-Loop)硬體在環模擬測試系統是採用即時處理器運行模擬模型來類比受控物件(如:汽車、航空飛機等設備)的運行狀態,以此判斷在自動駕駛的HIL測試中電控模組的性能。想使用GNSS模擬器測試汽車運行是否正常,就需要把自動駕駛儀的資訊返回到GNSS模擬器中,再進行下一個軌跡的模擬。
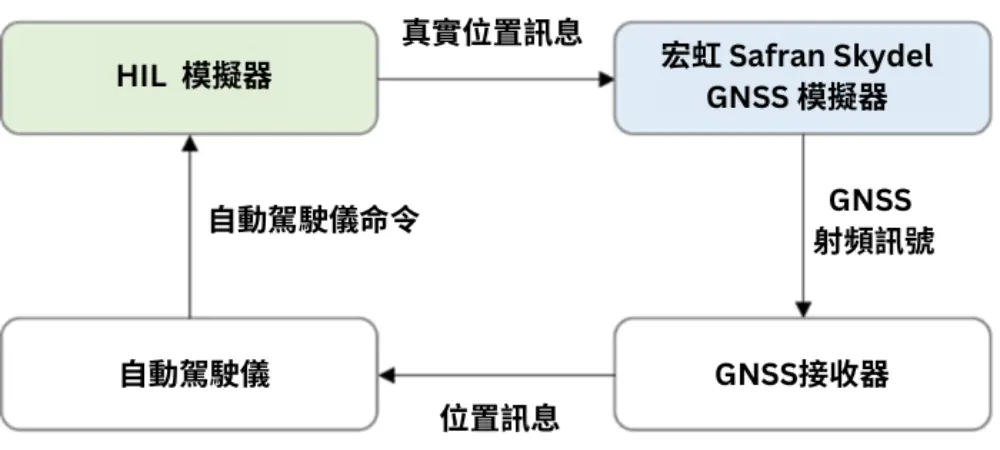
HIL(Hardware-in-the-Loop)硬體在環模擬測試系統
而目前測試標準與應用場景來看,HIL測試對於即時性有極高的要求,尤其是對於汽車、飛機、航空航天器等高安全要求、高顯示成本、低容錯乃至零容錯的應用,即時性是不可或缺的保障。
宏虹Safran GNSS類比器具有其軟體定義架構的特點,基於Linux開發的Skydel軟體可以作為硬體部分的大腦與心臟,將處理壓力與網路模擬壓力轉移到軟體與平臺上,極大的提高真實軌跡位置的數據處理與GNSS RF網路的輸出能力,在大型場景的通訊模擬場景下,延遲可控且極低。
Safran GNSS模擬器的SDA架構產品系列中的GSG7/8的延遲可以達到10ms,經過系統調試與調節,最低甚至可以達到5ms,這是目前業界公佈的最低也是最真實的延遲!相對於上一代產品的130ms,宏虹Safran GSG7/8可以說真正使得HIL測試達到“近乎即時”的效果。
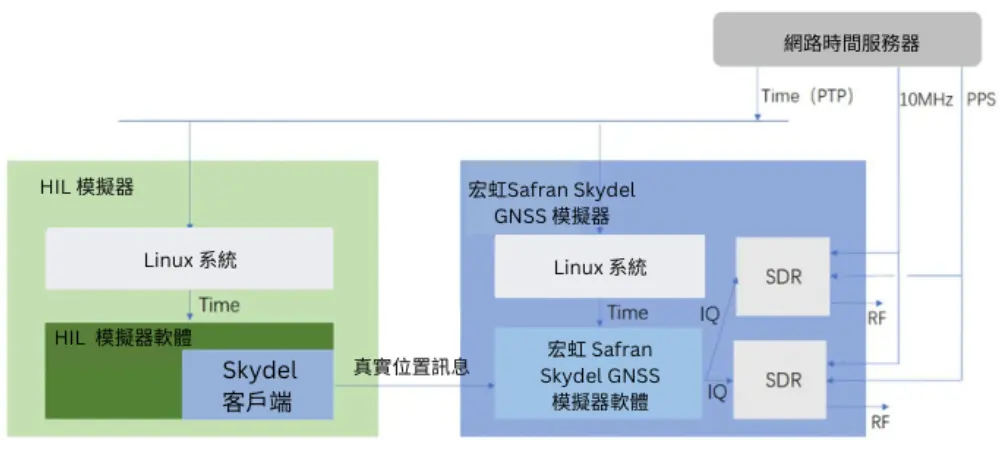
宏虹 Safran 模擬器
另外,它內置了延遲調教與視覺化的GUI介面,不僅方便使用者真實觀測延遲並透過調整系統參數降低延遲,也提供對外的開放介面,允許客戶在HIL整套系統的層面進行觀測與優化:
HIL 觀測與優化
3. 強大的功能與參數
GNSS模擬器歸根結底是一種設備或系統,它是為了替代或補充真實環境測試的一種工具。因此一方面要保證真實,另一方面要有強大的性能去支援高度複雜與全面的模擬過程。
- 宏虹Safran GNSS模擬器支援多個實例同時模擬,實現大型車隊或複雜多單元場景的模擬效果,實現雙天線姿態校正、RTK場景模擬、車輛碰撞測試、航空航天器即時對接與姿態修正等場景;
- 支援1000Hz的網路反覆運算率,目前大多數的模擬設備都是10Hz的反覆運算率,而更高的反覆運算率意味著可以帶來更高速場景與更高精度的模擬,這對於高精度與高速場景十分重要;
- 在真實環境中,有很多個星座與衛星共存,以手機GNSS接收功能來看,室外隨時都可以捕獲到幾十顆衛星!而這僅僅只是一個接收機。在大型模擬的專案中,存在多個接收機,可能需要上百顆衛星同時進行模擬。考慮到這一場景,基於軟體定義結構的宏虹Safran GNSS類比器具有更為明顯的優勢,可模擬的星座與搜星數量不會受限,只需要添加相應數量的GPU與SDR即可
- 基於軟體定義架構的宏虹Safran GNSS模擬器對於時鐘同步精度和數據格式的豐富度都有著強大的支援。
總結
基於這樣的強有力設備,宏虹Safran GNSS模擬器針對自動駕駛、V2X等場景均構建了不同的駕駛方案,與多個知名測試廠商合作搭建了多種方案,例如:基於GNSS的自動駕駛功能 HIL測試系統、基於ITS頻段PC5介面的V2V和V2I通訊測試系統、整合網聯汽車車隊管理系統測試方案、用於飛行模擬和飛行員培訓的HIL測試系統等。



