EtherCAT(Ethernet for Control Automation technology)是一種實現數據特定傳輸的硬實時技術。它可以提供實時性能,旨在通過雙絞線或光纖電纜最大限度地利用高速全雙工以太網數據傳輸,以滿足工業過程控制需求。
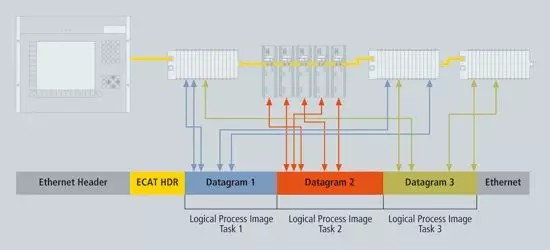
基於以太網技術的EtherCAT具有易於實施、擁有成本和標準化等優點,使其成為工業應用上旨在最大限度提高控制系統性能的完美解決方案。該技術的媒體訪問控制採用主/從原理,其中主站節點(通常是控制系統)將以太網幀發送到從站節點,從站節點動態地從這些幀中提取並插入數據。