
ADTF自動駕駛輔助系統開發框架
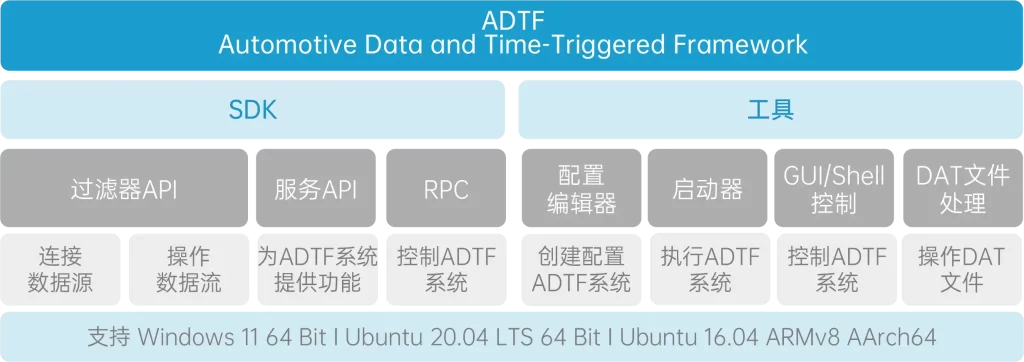
ADTF
Automotive Data & Time-triggered Framework
專為ADAS和自動駕駛系統提供全面的開發解決方案,涵蓋開發、驗證、視覺化和測試。ADTF提供大量特定需求即用外掛程式,具有高度的可擴展性和靈活性,能夠説明開發人員快速驗證系統功能,加快開發進程。
主要功能

資料記錄與重播
支援視頻、LIDAR、RADAR等多源感測器資料及車輛狀態資訊的記錄,並提供精確重播功能,確保自動駕駛功能測試與驗證的資料一致性和準確性。
硬體整合
基於AUTOSAR和ASAM等標準,ADTF實現與多種車輛匯流排系統和感測器的隨插即用集成,簡化了硬體設備連接和資料交換。
測試與驗證
整合類比、原型製作和資料記錄等多種工具,全面支援軟體的測試、驗證和評估過程。

數據視覺化
支援二維和三維資料的視覺化,包括信號繪圖、Qt、OpenGL和OSG的2D/3D視覺化工具。

後處理與模擬
支援深入的測試後資料分析和驗證,確保演算法和功能正確,同時提供類比環境以在無硬體條件下測試軟體元件。
快速原型開發
ADTF SDK和開源元件支援自訂開發ADTF篩檢程式、服務或獨立應用程式,提供高度靈活性和定制化解決方案。
優勢特點
模組化架構
ADTF具有平臺獨立性和向後相容性,能夠在 Windows、Linux 和 ARM 環境中運行配置,完成開發的元件還可用於更高級的模擬環境和測試設置。
ADTF能夠解碼 autosar 描述的匯流排資料流程,在標準化 DDL資料流程中提供 CAN, CAN FD 和 Flexray 資料並進一步處理。
隨插即用
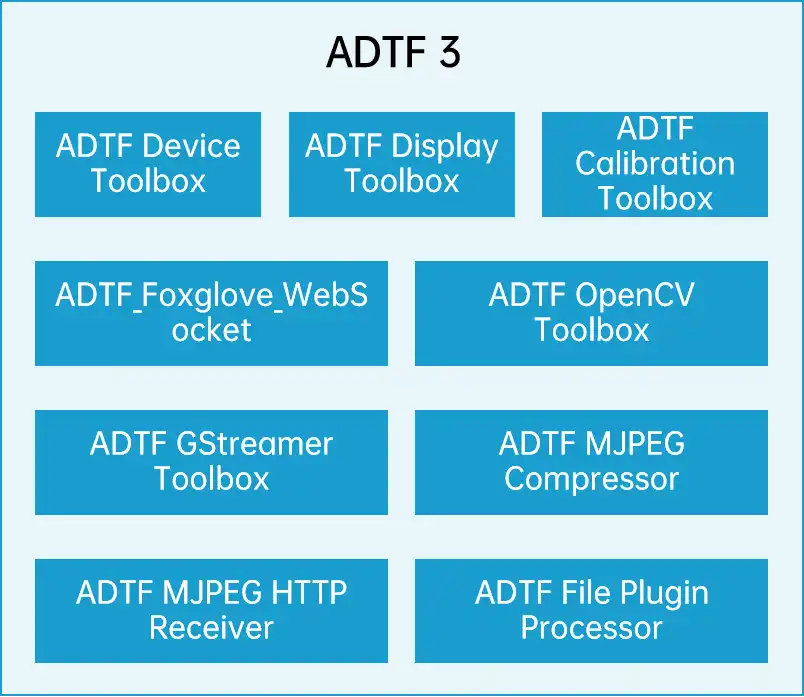
ADTF 為 DW 雲存儲中的特定需求提供了大量 “隨時可用” 的外掛程式和篩檢程式,可以通過隨插即用集成到 ADTF 配置中。通過與 ADTF 工具集的直接連接,可以按需提供擴展,也可以通過通用介面連接到其他軟體產品。
- 支援汽車匯流排(CAN、CANFD、Flexray、乙太網)、Vector® Driver Library的設備、網路攝像頭、信號處理和視覺化、ARXML資料庫檔匯流排解析
- 提供多種視覺化模組:3D場景圖顯示、2D顯示、信號視圖外掛程式
- 支持通過多個篩檢程式與 ECU 進行 XCP 通信,以便通過 CAN、FlexRay 或乙太網進行通信
應用場景
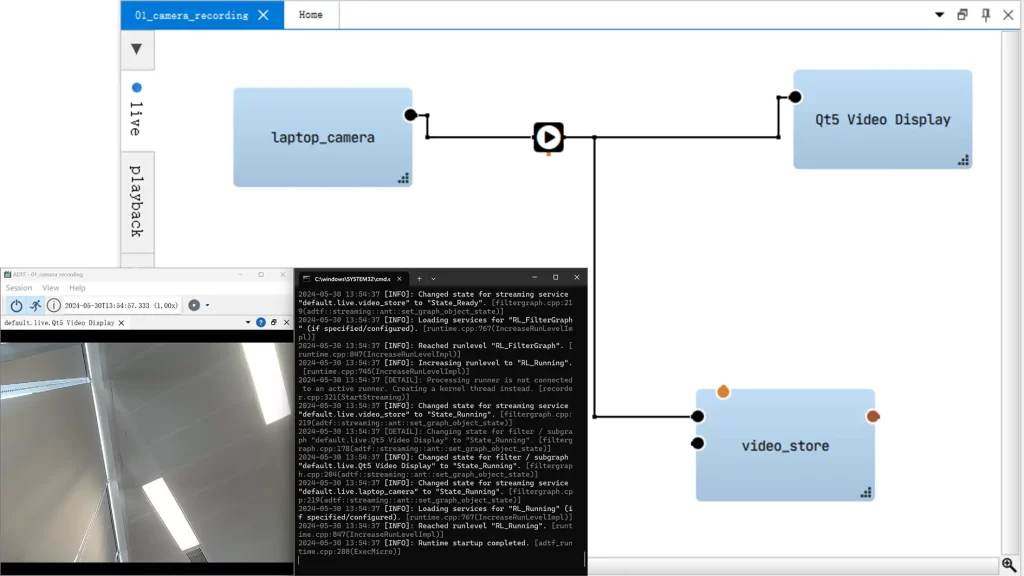
感測器資料獲取&重播
記錄感測器資料和通信資料等各種資料流程,即時顯示、存儲和重
數據視覺化
通過採集雷射雷達的點雲資料,並通過目標檢測演算法,識別點雲中頭部資料
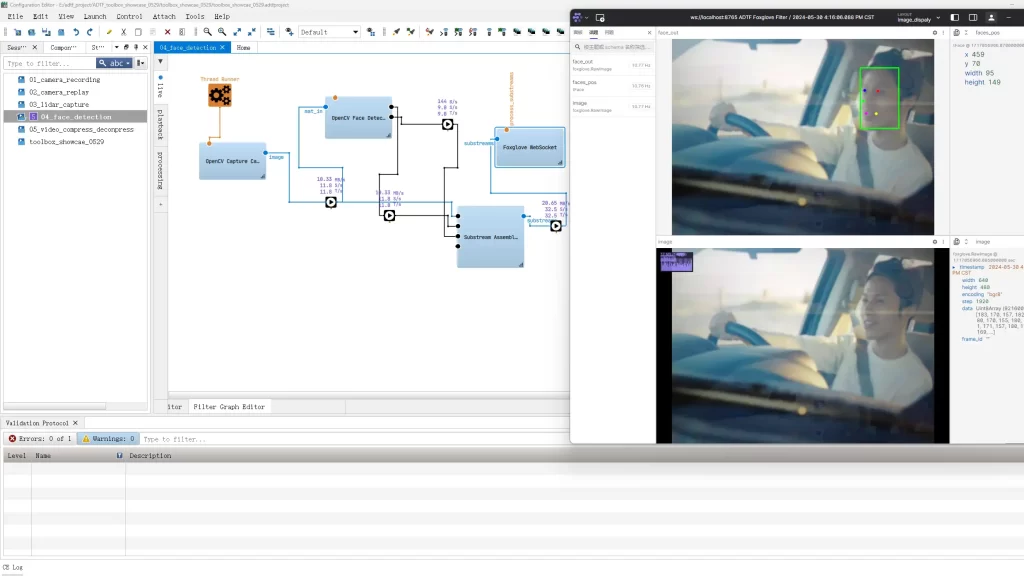
演算法檢測
通過部署面試識別演算法,可以快速檢測並輸出結果顯示
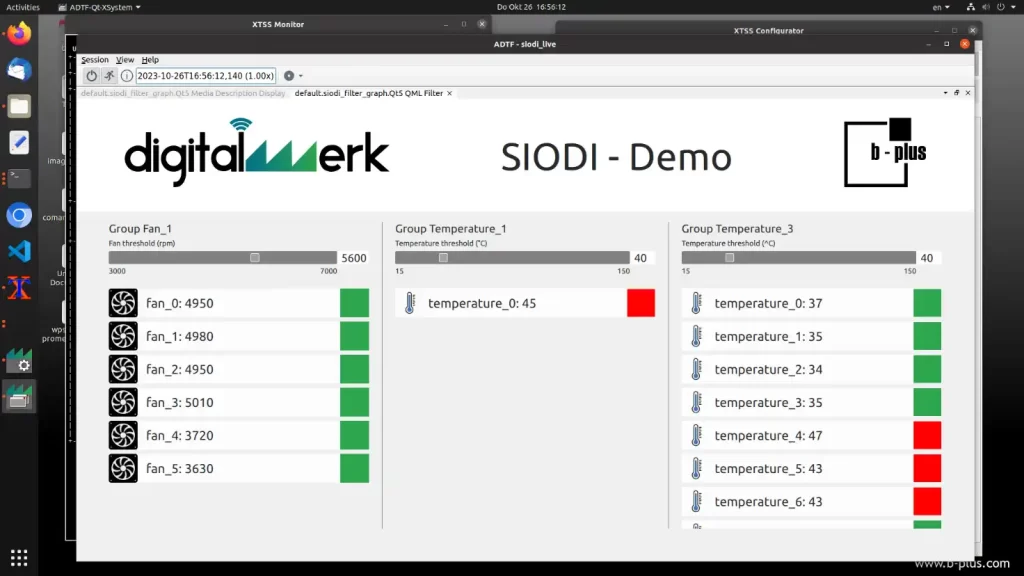
SIODI硬體監控
即時監控和顯示硬體各類參數並進行整合和性能記錄
支持平台(推薦)
• 支持平台:支持Windows 64 Bit platform
(e.g.Windows 7or11)
• 要求:運行時——
1、Visual C++ 2019 Redistributable
2、Visual C++ 2019 / Visual C++ 14.2 (for
debug libraries and executables)
開發時——
1、Visual C++ 2019 (at least CXX Compiler
MSVC 19.29) / Visual C++ 14.2 (VC142
Toolchain at least 14.29)
2、MSBuild Version 16.x (at least 16.11)
3、MSBuild Tools only or full Visual Studio
IDE installation which covers this
requirements
4、Windows Kit 10 (at least 10.0.19041.0)
5、CMake ≥ 3.23.2
• ADTF delivery package的可用磁盤空間:4GB
• 支持平台:支持其他發行版(例如Fedora, Debian)
• 要求: 1. gcc ≥ 7
2. libc ≥ 2.27
3. libstdc++ ≥ 6.0.25
4. CMake ≥ 3.23.2
5. build-essential libarchive-dev
mesa-common-dev mesa-utils
libglib2.0-0 libxcb-xinerama0
xterm
• ADTF delivery package的可用磁盤空間:6GB
• 支持平台:支持其他發行版(例如Fedora, Debian)
參考硬件是nVidia Jetson TX2
板(兼容例如nVidia Drive PX 2
或 Jetson AGX XAVIER)
• 要求:1. gcc≥ 7
2. libc ≥ 2.27
3. libstdc++ ≥ 6.0.25
4. CMake ≥ 3.23.2
5. build-essential libarchive-dev
mesa-common-dev mesa-utils
libglib2.0-0
• ADTF delivery package的可用磁盘空间:4GB
為您的自動駕駛系統找到適配的技術