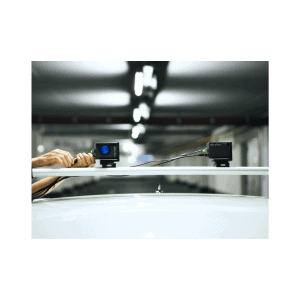



ZED X 車載雙目相機
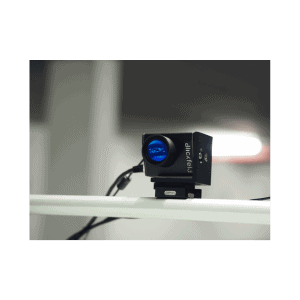
車載單目相機 ZED X One
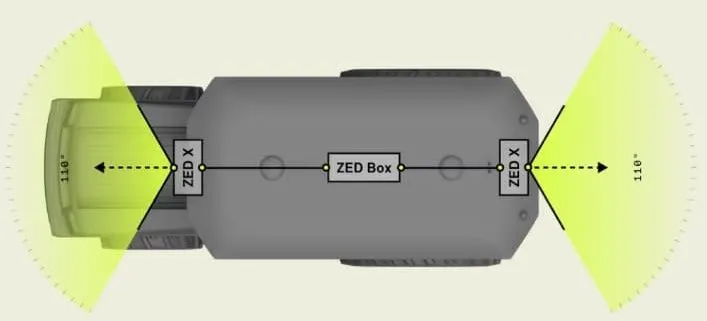
ZED X 系列雙目相機,專為滿足機器人導航與自動化應用於嚴苛環境中的需求而設計,提供 ZED X 與 ZED X Mini 兩種外型(另有 ZED X One 單目相機)。
所有功能皆由全域快門感測器與安全的 GMSL2 連接架構驅動。ZED X 主要應用於障礙物偵測與導航場景,ZED X Mini 則針對近距離感測應用進行最佳化。
描述
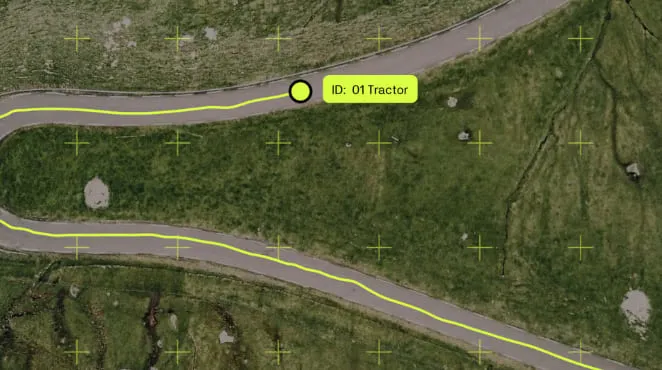
高精度 3D 定位
透過 ZED SDK,結合多台 ZED X 相機與全球導航衛星系統(GNSS)定位資料
可實現高精度 3D 定位能力。

物件偵測
透過 ZED SDK 結合深度感測與視覺里程計,可建立機器人周圍環境的佔據地圖,(Occupancy Map)
支援於室內與室外等非結構化環境中的安全導航。
室內機器人
賦予室內移動機器人理解日常環境的能力

戶外機器人
協助戶外移動機器人辨識並適應更具挑戰性的環境

機械手臂
為機械手臂導入先進的 3D 感知能力,以進行物體偵測與追蹤