汽車電子系統中ECU數量增加,因此CAN總線通訊的資料量也急遽增加。但是CAN總線負載率過高會導致一些週期性資訊由於匯流排競爭,造成封包延遲甚至出現錯誤訊框的情況。
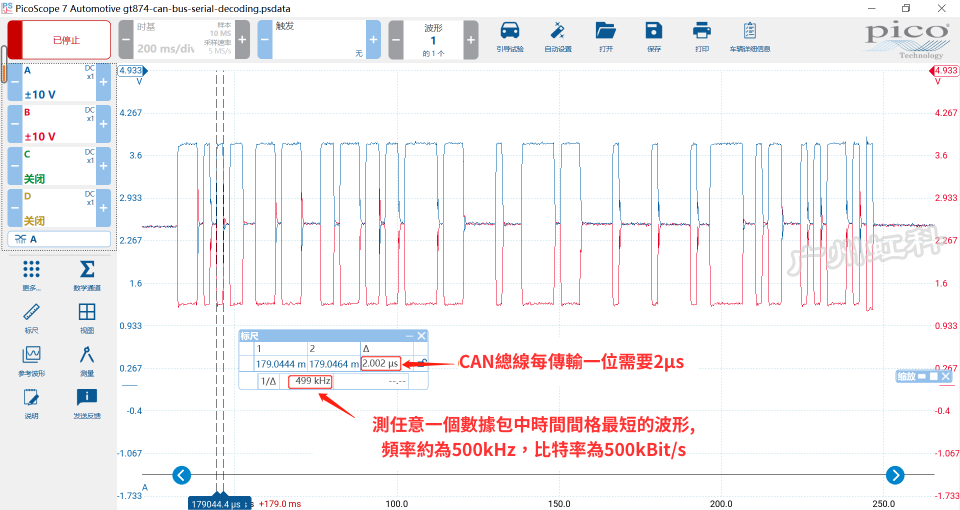
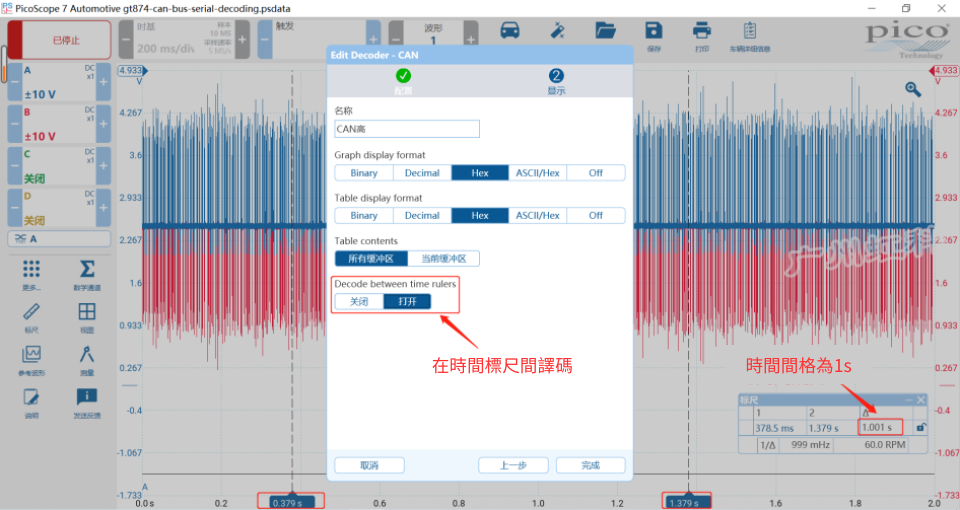
對於汽車維修診斷行業,假設後裝了車聯網或導航一體機到車輛CAN總線上,加裝的節點很可能會使得報文過多負載率偏高,我們可以用宏虹Pico汽車示波器捕獲CAN訊號並且計算出負載率,判斷這些加裝的節點是否導致過載。對汽車模擬設計與最佳化方面,我們不僅能利用示波器計算出負載率,還能分析CAN匯流排每條封包的延遲,兩者結合才能最佳化CAN總線以降低負載率。
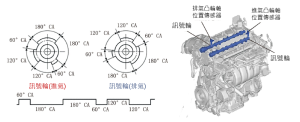
在正式開始介紹如何使用宏虹Pico汽車示波器計算CAN總線負載率之前,我們首先要知道一個CAN標準資料幀的欄位組成和位數(如下)。