這個月我們得到了一篇非常棒的案例,由美國西部的CARQUEST TechnicalInstitute(CARQUEST技術學院)的講師Adam Robertson整合的一篇關於2002年的Chrysler PT Cruiser的案例。
故障情況:
這輛Chrysler PT Cruiser必須節氣門全開才能啟動否則火花塞會積塞過多的燃油。一旦最終起動了之後,汽車會抖動,但是在轉速1200RPM以上可以行駛。如果轉到怠速,汽車會發出號叫聲並且熄火。尾氣管有時會冒出黑煙。檢查發現故障燈亮,不斷報故障碼P0172(系統(空燃比)太濃 (第1排))。除此之外沒有其他故障碼。
基本資訊:
這輛車上裝有一個空氣壓力感測器。在這種燃油控制系統中,適宜的真空度是非常關鍵的。這輛車行駛在海拔1200多米的地方並且在怠速時真空表汞柱為13英寸。當發動機加速到2500轉時汞柱上升到17英寸。氧感測器積汙,但當加熱到足夠的程度時輸出固定在1V左右。燃油修正顯示混合氣過濃,但是燃油閉環控制經常不作用。這輛車進過多家修理廠修過但都沒解決問題。
初步設想:
車輛很顯然混合氣過濃:
– 過量的油是從哪裡來的?
– 我可以用什麼設備來找出這個故障根源?
– 我應該檢測哪個系統?
診斷思路
在這種情況下,首選並沒有一個很好的線索來提供一個特定的診斷方向。所以,我決定進行一個快速測試來看看三個關鍵的地方:1、機械狀況。2、點火。3、噴油。因此,我用一個4通道Pico汽車示波器連接到點火系統和噴油嘴,並將一個壓力感測器通過管子接入氣缸裡,測量氣缸工作時的壓縮狀況。這些測試能對發動機工況進行一個快速的瞭解,包括氣缸工作時的四衝程完整的機械狀況。
下面這些測量到的都是4缸的波形。
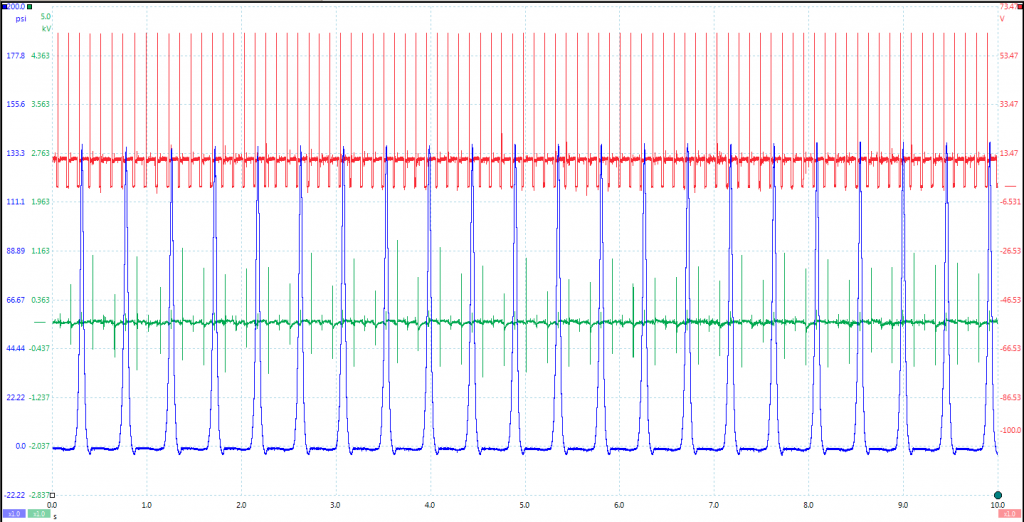
測試條件:發動機起動過程中
紅色:4缸噴油信號(同步)
綠色:來自所有氣缸的點火雜訊(同步)
藍色:氣缸壓縮信號
下面將壓縮波形放大,並將尺規對好其中兩個相鄰尖峰處。藍色波形的每個尖峰代表壓縮上止點。相鄰兩個尖峰之間曲軸轉過720度的轉動中,噴油嘴噴了四次油總共66ms。
下面的波形是在發動機轉速1000rpm下採集的。
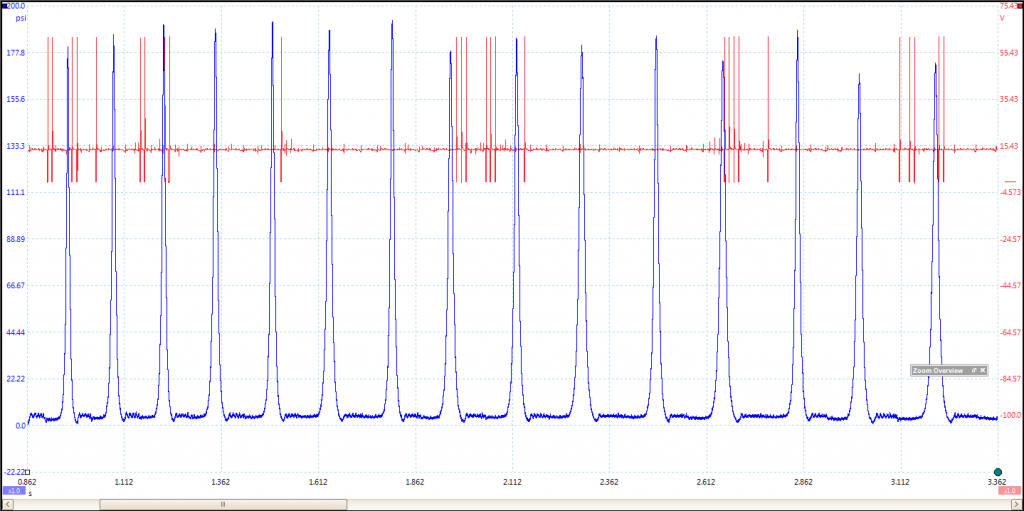
雖然氣缸的壓縮波形直觀體現了一下變化,但是我還是將注意力放在這個噴油異常的噴油嘴上。很明顯,噴油嘴噴油異常從而造成了噴油過濃,低真空和故障碼P0172。
分析
首先我們知道,一些執行器的輸出,例如噴油嘴,需要正確的“QQT”(輸入量,輸出量,正時)參數來修正來決定噴油時刻和噴油量。
輸入量(電信號值)是正確的嗎?
觀察:噴油嘴每次噴油的電信號值(功率,接地和供應脈衝)都在正常範圍內。
結論:正確,各電信號值是正確的。
噴油量正確嗎?
觀察:噴油嘴每次噴油的脈寬都在可接受範圍內,並且噴油量都正確,並且ECM看上去可以進行正確控制。 結論:雖然總的噴油量過多,但每次噴油的噴油量都是正常的。
正時正確嗎?
觀察:通常情況下,在任何一個四衝程迴圈中,噴油嘴只噴一次油(一些新式的車上有多次噴油)。在這輛車上,噴油嘴在同一迴圈中噴油多次,有時甚至不噴油。
結論:正時不正確。
QQT結論:噴油時有正確的脈衝,正確的噴油量,但是正時不對。
哪些信號參與控制噴油嘴的輸出?也就是說,噴油嘴什麼時候和多久噴一次油是由是什麼決定的?
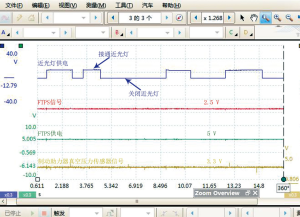
來看看曲軸感測器和凸輪軸感測器。下面紅色的是凸輪軸感測器波形,黃色的是曲軸感測器波形
下面將波形放大。
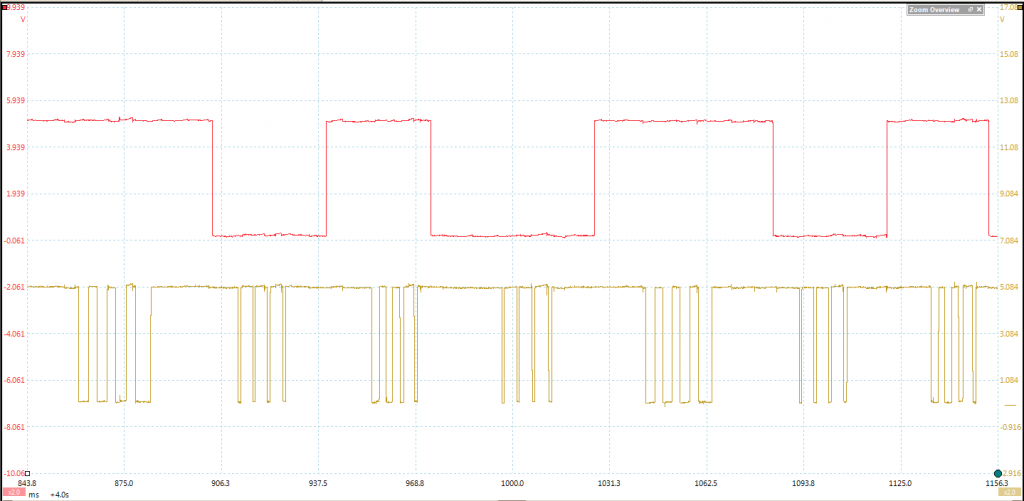
放大後,能更容易看到完整的信號和同步狀況。根據以往看到過的許多好的波形的經驗,我可以斷定黃色波形曲軸感測器信號有問題。看上去顛倒了。為了確定這一點,我拿一個來自Thompson汽車試驗室的好的曲軸感測器和凸輪軸感測器波形作參考。這提供了一個國產(指英國國產)發動機中60種曲軸/凸輪軸信號中已知的非常好的一個例子。
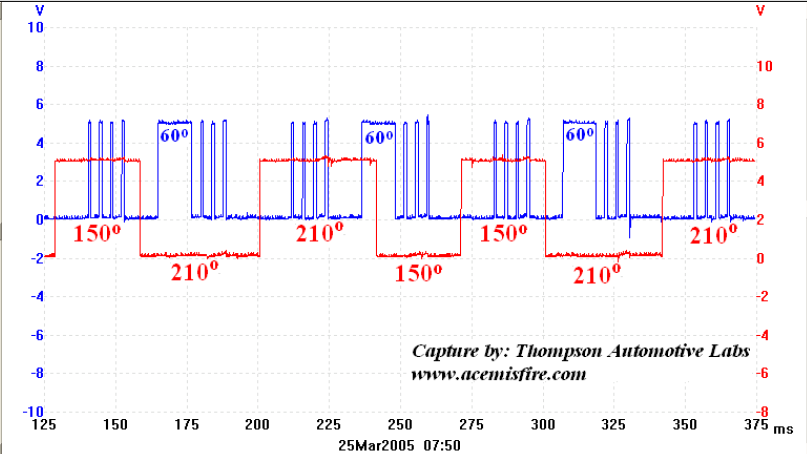
這兩個波形中的凸輪軸感測器信號看上去很相像,但是曲軸感測器信號卻有不相同。這輛車的曲軸感測器信號顛倒了,並且占空比不匹配。檢查示波器的設置和線的連接,一切正常,線是按照汽車電路圖連接的。
解決方法
進一步檢查曲軸感測器電路和磁組輪之後,我可以肯定曲軸感測器本身有故障。更換了曲軸感測器之後,噴油,火花塞,和車輛都運行正常,並且真空度也恢復到了正常水準。
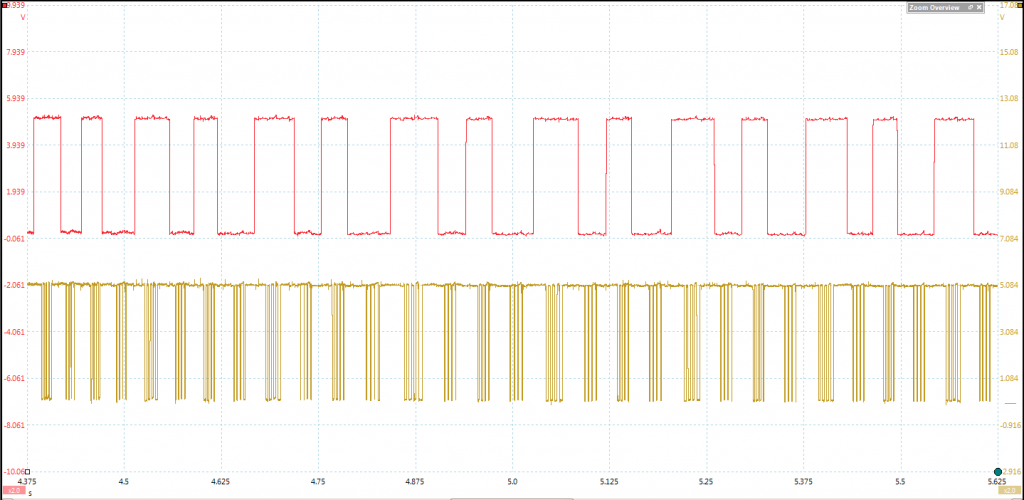
更換曲軸感測器後測得的波形如下。
綠色:曲軸感測器波形
黃色:凸輪軸感測器波形
紅色:4缸噴油嘴波形
藍色:4缸壓縮波形
最初只有一個故障碼P0172(噴油過濃)並不能給診斷提供一個很明確的方向,並且這輛車在好幾家店都修過,浪費了很多時間。
這個例子很好的演示了“通過輸出來確定診斷方向”這樣一種診斷方法。
在常規的診斷中,有些遇到的故障會留下一些關鍵的線索。例如一些車打火時總是無法成功起動,大多數汽修人員會檢查像燃油壓力、點火、噴油脈衝和機械完整性等。這都是一些相關的簡單的步驟,在先進診斷程式或作業中,很多情況下並不需要太多。
在一些案例中,有的故障碼能很準確的指出問題所在,然而有的像本案例中的P0172(系統(空燃比)太濃 (第1排))這樣的故障碼,就像郵遞區號一樣,只告訴汽修人員一個大概的範圍卻不會指明一個準確的“位址”。
隨著出現的故障越來越難以捉摸、間歇性以及複雜,要找到正確的診斷方向會變得更加的困難。因為在沒有診斷方向的情況下,你不知道使用什麼診斷工具,診斷什麼部件?
我們可以將模組的邏輯分解成基本的五個部分。任何一個部分中出現的錯誤都有可能是故障的根源。
1-基本或者預設的程式——這在一些直接的感測器輸入中可能是不可靠的,一個預設值或者起始點。
2-輸入——這為模組提供了一些必須適應的變化的資訊。曲軸感測器、凸輪軸感測器、車速感測器、空氣流量計、節氣門位置感測器、空燃比感測器、開關等。
3-處理——輸入的信號必須經過邏輯的計算和處理,再決定下一步動作或者輸出。
4-通信——接受了輸入的信號或者經過計算的資料,在進行下一步動作之前,可能還要將這些資料與其他模組共用。典型的就是行車電腦資料網路。記住一點,一個模組接收了輸入信號並對之進行處理,另一個模組可能就需要進行相應的動作。
5-輸出——輸出包括噴油脈衝、點火、各類型的螺線管、馬達動作等。
輸出需要正確的QQT(輸入量,輸出量,正時)。在現在的診斷設備和程式説明下,我們能很快速、很輕易地就獲取到這些資料。測量這些輸出或者“最終結果”能給診斷提供一些必不可少的線索或方向,就如這個案例中情況一樣。另外,在進行診斷時可能一些故障並不明顯,但是通過測量一些輸出可以找到有效的蛛絲馬跡。