一、什麼是 光學雷達 LiDAR ?
LiDAR ,是Light Detection and Ranging的縮寫,常用作代表 光學雷達 。
LiDAR 是一種感測技術,可發射低功率、人眼安全的激光進行脈衝測量,並測量激光完成感測器與目標之間往返所需的時間。所得的聚合數據用於生成3D點雲圖像,同時提供空間位置和深度資訊以識別、分類和追蹤運動對象。

二、 LiDAR 工作原理
LiDAR的工作原理是檢測並測量返回感測器中接收器的光。一些目標比其他目標反射的光線更好,這使它們更容易可靠地檢測和測量到感測器的最大範圍。比如,黑色表面善於吸收更多光,而白色表面能夠反射更多的光。這樣一來,與目標主題顏色相對較暗的目標相比,相對顏色較亮的目標更容易在更長的距離上受到可靠地檢測或測量。
對於窗戶等像鏡子一樣的目標在檢測和測量方面頗具挑戰性,因為與在多個方向上分散光的漫射目標不同,類似鏡子的物體只能反射很小的聚焦光束,而不會直接反射到感測器的接收器中。
同時,諸如路標和車牌之類的可反光目標將高百分比的光返回接收器,並且是LiDAR感測器的良好目標。由於存在這些差異,LiDAR感測器的實際性能和最大有效範圍可能會根據目標的表面反射率而有所不同。
● 點雲
點雲是在同一空間參考系下表達目標空間分佈和目標表面特性的海量點集合,在獲取物體表面每個採樣點的空間坐標後,得到的諸多特徵點的集合,稱之為“點雲”(Point Cloud)。點雲是由3D點數據組成的大型數據集,由激光測量原理得到。車載光學雷達產生的點雲包含來自周圍環境的原始數據,這些原始數據是從移動物體(例如車輛和人)以及靜止物體(例如建築物,樹木和其他永久性結構)掃描而來的。然後可以通過軟體系統轉換包含數據點的點雲,以創建給特定區域的基於LiDAR的3D圖像。
激光測量得到的點雲內容包括三維坐標(XYZ)和激光反射強度(Intensity),強度資訊與目標的表面材質、粗糙度、入射角方向,以及儀器的發射能量,激光波長有關參數等。
● FOV
FOV,是Field-of-View的英文縮寫,定義為感測器覆蓋的角度(以度為單位)。通常,LiDAR傳感器的性能是在水平和垂直視角中測量的。所以,LiDAR的主要參數包括Vertical FOV和Horizontal FOV。
三、基於 LiDAR 與普通雷達的鏡頭感測系統有何不同?
LiDAR和雷達均用於確定運動物體的速度,範圍和角度。雷達使用無線電波代替光,而相機則依靠數百萬個像素或兆字節來處理2D圖像。
與雷達不同,LiDAR可以提供周圍世界的完整實時3D圖像。此外,與相機不同,LiDAR不提供PII(個人識別信息)風險,並且誤報率較低。LiDAR可以在確定目標距離的同時創建目標的圖像,從而提供目標的3D視圖並精確計算目標的運動方向,而相機和雷達都無法提供。
此外,無論是在黑暗中還是在雨天或雪天等天氣條件下,雷達或相機都無法準確看到,這嚴重限制了它們的“視線”能力。LiDAR還可以提供一定範圍內物體的表面測量和精確解析率。

對於無人駕駛汽車,最強大且響應迅速的安全感測器系統將是全套LiDAR、雷達、相機,其中LiDAR作為主要感測器。
四、 LiDAR 在自動駕駛中的地位
與相機和雷達不同,LiDAR可以在白天或夜晚的任何光照條件下運行,這使其成為自動駕駛汽車不可或缺的技術。相機鏡頭、雷達和其他技術可以在一定程度上幫助車輛“看到”周圍的環境。一旦天黑或下雨,相機鏡頭技術就無法提供汽車準確看到並區分人與其他物體所需的高解析度圖像。LiDAR仍然是唯一提供最高範圍精度和最佳角分辨率的感測器,因此LiDAR對於確保乘客和行人的安全至關重要。
五、車用 LiDAR 種類
車用LiDAR可以分為機械式和固態式兩種。
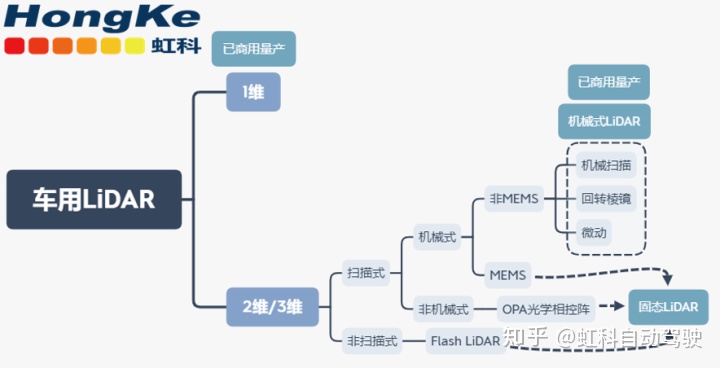
● 機械式 LiDAR
目前,僅用於ADAS系統的機械式LiDAR已經商業化量產。用於L4級別以上的機械LiDAR往往安裝與汽車頂部,進行360°機械式旋轉掃描。但是機械掃描LiDAR會造成掃描盲區,即汽車周圍近距離內是視野盲區。另外,在長時間的使用過程中,電動機械件容易故障,從而易產生安全問題。

因此自動駕駛研究員開始研究固態光學雷達,但近年來,一些帶有微小移動部件的光學雷達也被統稱為“固態光學雷達”,它們具備了固態光學雷達很多的性能特點,如解析度高、有限水平FOV(前向而不是360°)等,但他們從嚴格意義上來說不能算純固態光學雷達。代表為MEMS光學雷達。
MEMS(Micro-Electro-Mechanical System)指的是將機械機構進行微型化、電子化的設計,將原本體積較大的機械結構通過微電子工藝集成在矽基芯片上,進行大規模生產。技術成熟,完全可以量產。主要是通過MEMS微鏡來實現垂直方面的一維掃描,整機360度水平旋轉來完成水平掃描,而其光源是採用光纖激光器,這主要是由於905納米的管子重頻做不高,重頻一高平均功率就會太大,會影響激光管的壽命。
從嚴格意義上來說,MEMS並不算是純固態光學雷達,這是因為在MEMS方案中並沒有完全消除機械,而是將機械微型化了,掃描單元變成了MEMS微鏡。
● 純固態 LiDAR
OPA(optical phased array)方案主要是採用多個光源組成陣列,通過控制各光源發光相位時間差,合成具有特定方向的主光束。然後再加以控制,主光束便可以實現對不同方向的掃描。雷達精度可以做到毫米級,且順應了未來光學雷達固態化、小型化以及低成本化的趨勢。其難點主要在於生產精度高,且需要提高單位時間內測量的點雲數據量。不過,隨著工業技術的進步,OPA方案的優勢會越來越大。
Flash方案光學雷達的原理是快閃,它不像MEMS或OPA方案掃描物體,而是短時間直接發射出一大片覆蓋探測區域的激光,再以高度靈敏的接收器,來完成對環境周圍圖像的繪製。
【推薦產品】


宏虹電子科技有限公司|台灣虹科
宏虹電子科技有限公司,總公司廣州虹科電子科技有限公司-位於中國南方經濟和文化中心的廣州市。我們耕耘的領域包括數據採集﹑無線電通信與監測﹑測試測量﹑汽車電子﹑自動化與嵌入式開發工具。十多年來,我們積累了豐富的知識和技術,加上與全球頂尖公司的技術和產品合作,我們一直為我們的用戶提供高質量﹑多功能整合系統﹑在地技術服務﹑及優質的解決方案。