如何減少城市擁堵?
根據相關資料,2018年,德國人被堵在路上的時間平均為120小時,在慕尼黑,人們被堵在路上的時間長達140小時。對個人來說,因為交通堵塞損失的時間是令人煩惱的,並且還影響到他們的生活質量。對國家來說,這給經濟帶來了相當大的影響。交通堵塞每年要花費幾十億歐元,因為員工們被困在交通堵塞中,無法提高生產力,貨物在路上而不是貨架上。此外,由於燃油消耗量增加,二氧化碳排放量增加,環境污染嚴重。擁堵是世界各地城市面臨的一個主要問題。
交通擁堵,這是所有道路使用者都以一種對自己最優的方式駕駛車輛所導致的。例如,他們可能會超車,或者改變車道——這些在他們看來是最快達到目的地的最佳方式。由於道路使用者不了解他們是如何影響周圍交通的,司機們自己並不知道一輛車停下,可能會引發三公里內交通堵塞。在交通規劃和控制中,必須平衡個人的行為,以優化交通流,這是我們必須要意識到的一個點。解決方案是以一種先發製人、分佈式的方式來管理交通,即以預期的方式,全面了解交通狀況。
借助LiDAR技術實現智能基礎設施

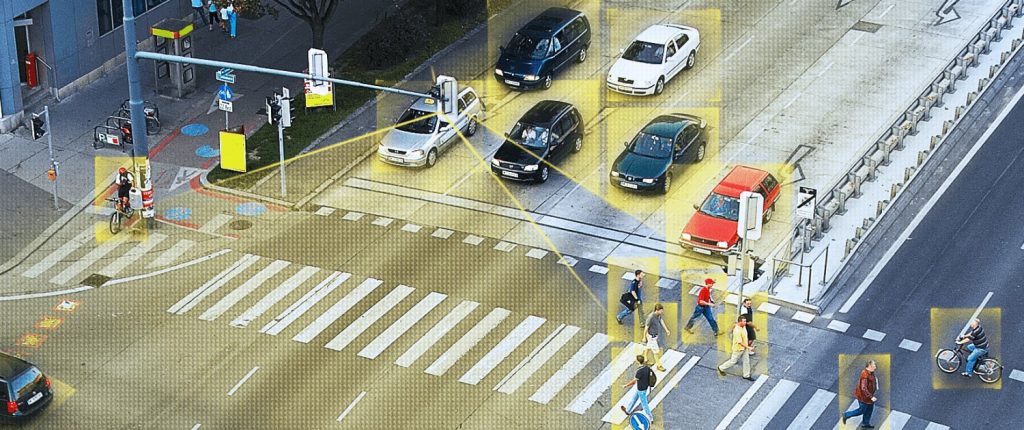
將激光雷達傳感器集成到基礎設施中可以藉助精確的3D數據優化交通流量,通過GPS、攝像頭和其他傳感器獲得一個完整的交通狀況,可以結合各種技術來獲取完整的交通狀況。但是,如果你仔細思考一下,你會發現其中一些不太適用於智能基礎設施:
全球定位系統(GPS):
GPS可以通過追踪道路使用者的移動情況為我們提供有價值的數據。因此,這種技術可以非常可靠地報告交通堵塞。然而,行人和自行車騎行者並不配備GPS。
攝像頭:
攝像頭和其他傳感器可以集成到道路基礎設施中來監控交通狀況,不需要像GPS那樣在道路使用者幫助下收集信息。這樣就可以將這些設備安裝在交通燈、路燈或交通標誌上,以採集周圍環境信息。但也存在明顯的優缺點:
例如,攝像頭可以記錄彩色圖像,但在黑暗環境下無法正常採集到環境信息。此外,攝像頭一般只捕捉二維數據,三維數據需要可靠地檢測物體和確定距離。在記錄和存儲個人數據方面,也可以發現攝像頭在數據保護方面存在不足。
雷達:
雷達主要用於速度監控,也可用於交通監控。然而,雷達只能提供一個非常粗糙的圖像,雖然這項技術能夠識別物體,但由於缺乏細節部分數據,它無法對物體進行分類。例如,雷達數據無法可靠地區分行人和騎自行車的人。
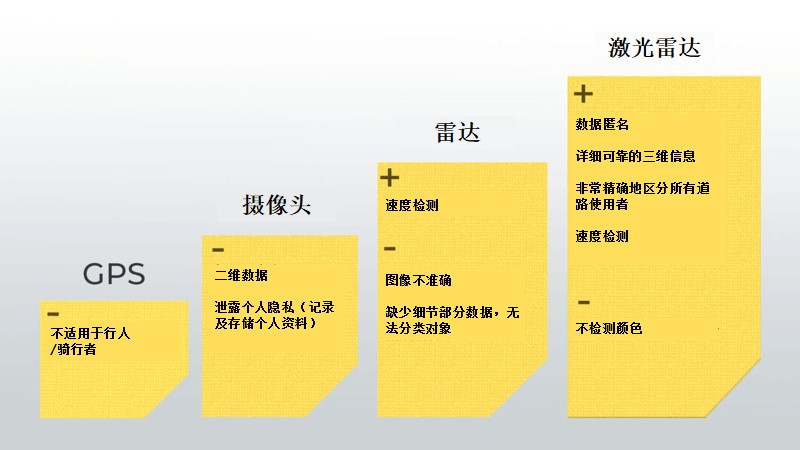
激光雷達精準捕捉道路使用者並保有匿名性
激光雷達技術是一種可以非常精確地區分所有道路使用者的技術。這類傳感器提供了詳細可靠的三維信息,便於區分不同的道路使用者。可以識別3D點雲是行人還是騎行者,但無法識別個人身份,這就很好地保護了道路使用者的隱私。
此外,即使在惡劣的天氣和環境條件下,激光雷達傳感器也能夠可靠地收集信息。黑暗、灰塵和霧天不會對其造成影響。除了位置和目標信息,傳感器還可以記錄速度信息,這有助於分析交通流或交通堵塞的原因。
固態技術成為當今激光雷達問題的解決方案
高科技傳感器目前主要用於自動駕駛領域,但它們面臨著一個重大挑戰:目前可用的激光雷達傳感器價格昂貴,而且容易出現故障。固態技術解決了這些問題。在固態激光雷達中,使激光偏轉以掃描環境的運動部件被免維護部件所取代。因此,傳感器更加堅固耐用,成本也更低,適合廣泛應用於基礎設施中。
捕獲交通信息有助於採取切實可行的措施
安裝在基礎設施中的激光雷達傳感器可以實時提供當前交通狀況的信息:交通是流動還是停滯?是發生事故還是道路施工?紅綠燈處或人行橫道上有許多行人嗎?
有了這些信息,可以實時採取以下措施,並根據交通情況進行調整,以優化交通流:
- 紅綠燈相位調整
- 速度限制調整
- 顯示交通堵塞警告
- 提供重新規劃路徑的建議
- 標識危險位置

在未來,我們甚至會更進一步:自動駕駛車輛將利用這些信息動態地調整他們的時間表和路線,以適應交通狀況。
以人為中心的城市交通
在許多城市,“汽車友好型城市”模式的影響至今仍清晰可見。城市規劃與汽車暢通無阻的目標相一致,但城市中的許多交通理念仍然以機動化個人交通為導向。城市和交通規劃必須更多地關注人。居民、通勤者和其他道路使用者必須是最核心的,這意味著交通盡可能安全和簡單。人行橫道的設計必須更加安全;必須避免轉彎事故;必須為騎自行車的人創造足夠的空間……這樣的措施清單還有很多。在智能基礎設施的幫助下,使智能交通控製成為可能,而激光雷達技術是其核心。
【來去逛逛】MEMS固態激光雷達HKCube Range 1
【來去逛逛】MEMS固態激光雷達HKCube 1