作者:Steve Smith | Pico Technology
診斷概述:
我不了解你是否有過這樣的情況,但有很多次當我對一輛高技術含量的車產生畏懼時,這預示著接下來所做的事情有可能會失敗。但值得高興的是,一輛車的技術含量越高,當它發生故障時就會有越多的機會去學習它的技術。現在就有這樣的一輛車,它的問題是由於過電壓導致了重複故障產生。
為了打破常規的案例研究,我找出了顧客抱怨的原因,我很確定這是一個間歇性的交流發電機的故障,而且也得到了證明,那麼也就不足為奇了,你可以選擇不再繼續看下去。然而,當面對高技術含量車輛的間歇性故障時,強調我們所面臨的問題才是對這篇案例進行研究的真正原因(包括零部件市場和特許經銷商)。
安裝一個交流發電機是非常容易的,並且也能達到我們想要的效果,但是利用PicoScope 和技術資料能夠對車輛電源系統進行描述與運作,因而我們能夠向我們的客戶證明安裝一個交流發電機是有必要的。
- 記住,如果我們不了解一個系統的功能,那麼我們將無法對這個系統做出診斷!
故障現象:
一輛BMW E60 545i ,搭載N62引擎,毫無徵兆的亮起儀表指示燈,且引擎加速無力。
診斷過程:
現在回頭想想,過電壓故障會有徵兆顯示,如:頭燈比平常更亮,鼓風機增強,雨刷速度增加,燈泡重複亮滅,電池的電解液水平比較低(伴隨著可怕的硫磺氣味)。
以上這些症狀在我們案例的車輛中都沒有出現過。這裡大多是客戶反映的症狀:車輛驅動沒有任何問題,然後毫無徵兆的,儀錶盤就像聖誕樹那樣亮起,同時出現警告信息從“制動穩定性幫助”變到“主動轉向系統故障”,其次是機械症狀,比如自動變速器處在一個特定的齒輪(鎖檔)並對油門踏板的輸入沒有任何反應。
一件事情是,我們的客戶在機場停車場經過很長時間才將車輛起動起來。開車大約6公里後駛入擁擠的公路交通,而以上所提到的症狀都表明客戶的車處於不穩定的狀態。在這件事中客戶不停的點火熄火,重複多次試圖發動引擎(引擎與起動馬達都沒有反應,但是儀表處於發亮狀態)
車輛熄火5分鐘後,能夠再次正常起動,客戶駕駛車輛過程中沒有任何重複症狀出現……..這種情況一直持續了兩週多的時間。
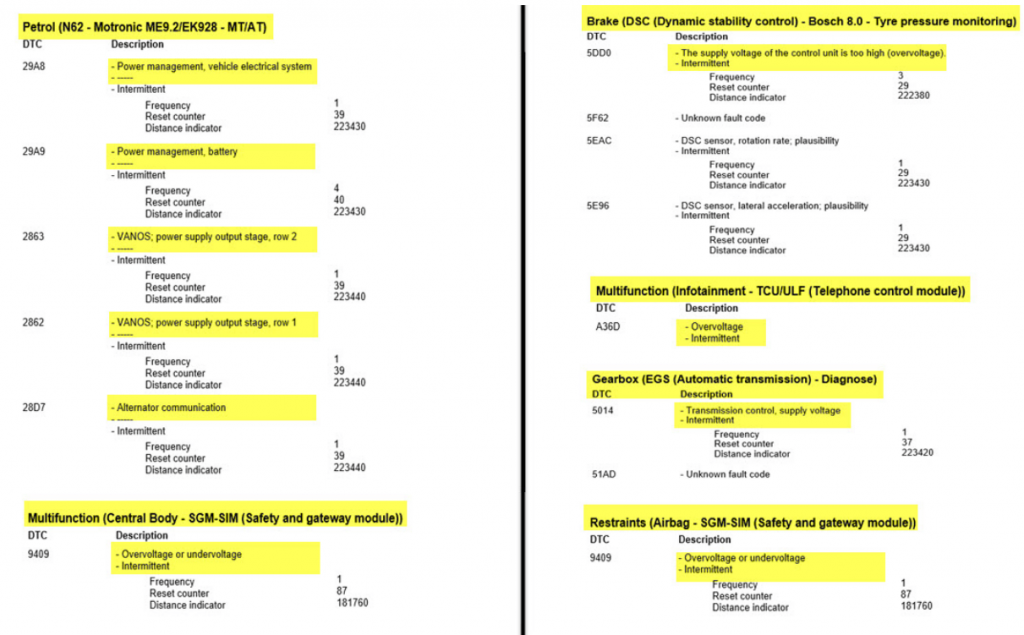
如往常一樣,與客戶的交流是非常重要的,因為以上信息在我們的診斷過程中都是必要的。經過基本的檢查證實了在我們可見的連接上是沒有任何問題的,主要的部件沒有發生漏電,線束路線都是正確的。連接的診斷電腦(診斷拼圖的一部分)確認了4個控制模塊都是過電壓的,2個控制模塊反映了電壓的相關問題,並且PCM也反映了間歇性交流發電機的通信故障。
診斷電腦提供了非常有價值的信息來解釋關於警示燈和警示消息出現的原因,更重要的是他們怎樣把通過“量程表”記錄的事件的歷史順序與彼此相互聯繫起來。
- 關於電壓故障的第一份報告(每個模塊發生1次)中央模塊和安全氣囊模塊過電壓情況報告,代碼為181760
- 關於電壓故障的第二份報告(發生3次)動態穩定控制模塊的過電壓報告,代碼為222380
- 關於電壓故障的第三份報告(發生1次)自動變速箱模塊的過電壓報告,代碼為223420
- 關於電壓故障的第四份報告(發生7次)PCM關於電壓相關問題的報告,代碼為223430
- 最終代碼所代表的問題有可能引發以前存儲的所有代碼PCM報告“交流發電機通訊”故障,代碼為223440
在這裡我們能夠判定過電壓故障曾經在一段時間內被反复的檢測到,並且大多數發生在量程表的最後20個計數內,最終以出現交流發電機的通信故障代碼結束。
為了著手進行與系統故障相關的電源診斷,我們必須從電池評估開始,在這裡使用PicoDiagnostics 是非常合適的,因為軟件中不止包含電池測試而且還包括啟動馬達和交流發電機測試。(為了評估3個主要的部件而進行的一種快速非侵入性的測試)
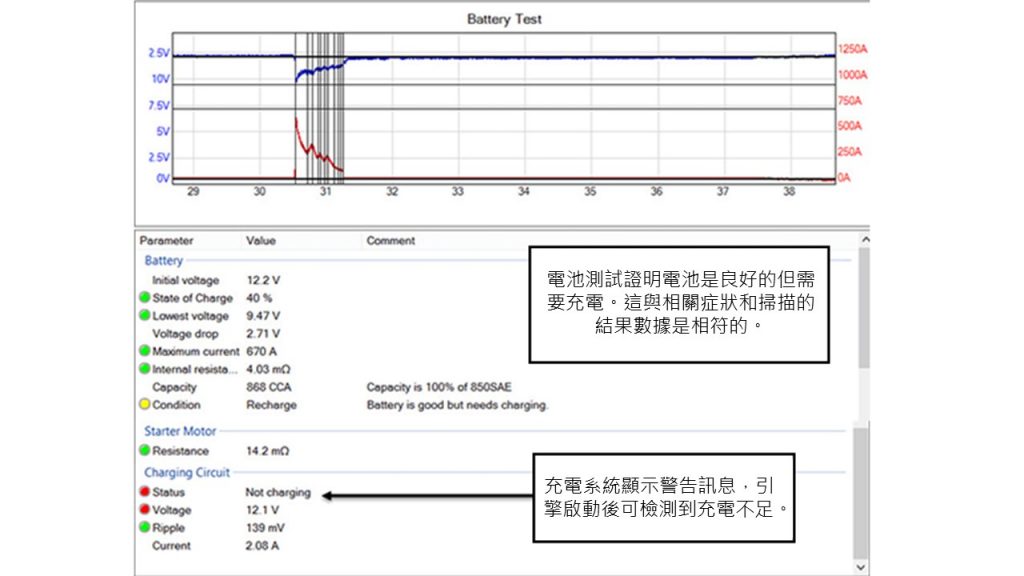
在這裡測試結果與預期的最初低電池電壓一樣(12.2V ),並且考慮到交流發電機的通信故障建議對電池進行再充電。測試結果還強調了一個潛在的充電問題即電池充電看似有充電但效率很低。
此時我們需要知道車輛上的充電系統是如何運作的,並且精確的技術信息是熟悉系統和診斷系統的關鍵(診斷拼圖的一部分)。
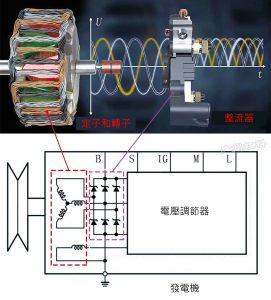
我們曾經處理過普通的充電系統,其中交流發電機通過充電指示警示燈(與內部電壓調節器)表明是正在工作中,那麼我們會有足夠的證據來證明替換交流發電機的必要性。然而這是擁有先進技術的車輛,車上使用“電源管理系統”,因此這裡必須謹慎的進行操作。
我們的交流發電機現在成為一個網絡的一部分,通過PCM中的電源管理軟件經由一條單一的通訊線(BSD線-位串行數據)進行控制。根據來自電池溫度傳感器和IBS(智能電池傳感器)的輸入,伴隨著引擎和電力負載信號,再利用交流發電機的輸出能夠適用於電池壽命、耗油量和排放水平的情況下,達到對充電系統的完全控制。

當檢測過程中出現例如過電壓的情況時,我們需要對其他的部件也進行考慮。是否是PCM的故障,IBS有問題嗎,或者是網絡的故障碼?我們現在提出這些問題的時機是恰當的,比安裝組件後出現故障時再問同樣的問題要好。
現在,之前的培訓和經驗開始發揮作用(診斷拼圖的一部分),因為我們需要對我們知道與不知道的事情進行評估。現在,我們能夠考慮如何更好的減少成本和易於操作來製定診斷方案:
- 很多模塊都處於過電壓狀況,不管歷史還是現在——事實
- 車輛的電池狀態良好,但是需要進行充電——事實
- 交流發電機的通信能力已經間歇性的失去了——事實
- 與IBS(智能電池傳感器)的通信沒有失去——事實
- 交流發電機在出現故障後需要充電達到一定程度才可以使用——有待證實
- IBS模塊可能會發送錯誤的電池數據——可能
- 交流發電機的PCM控制相對於輸入可能是不正確的——可能
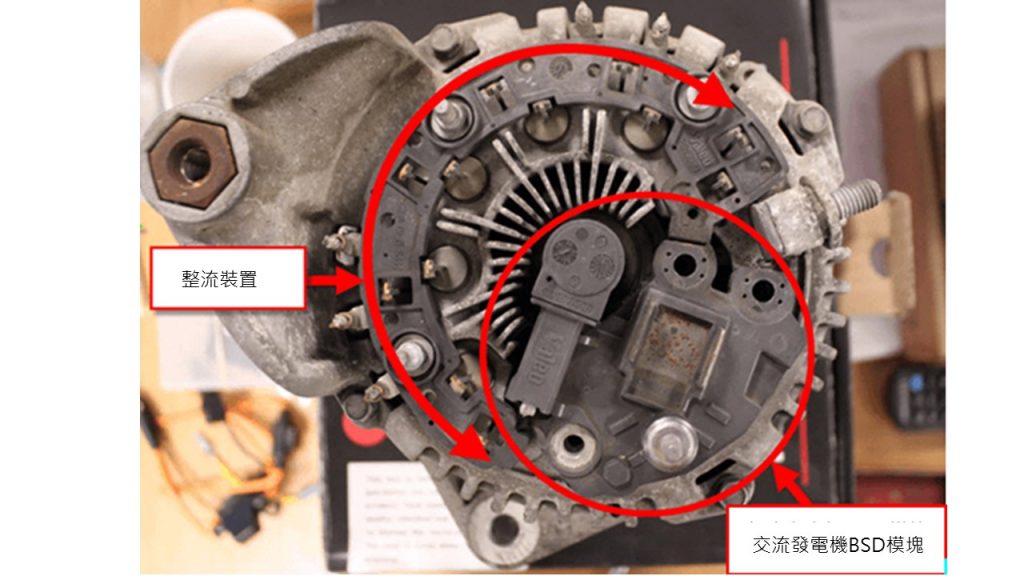
基於以上考量對充電系統進行物理檢查是很重要的。我們將會對充電控制系統進行評估,並且可能指出需要關注的區域。
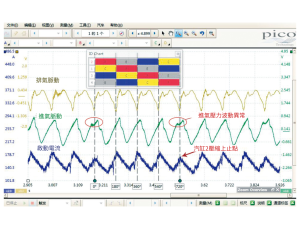
使用PicoScope(診斷拼圖的最後一部分)在以下的波形中可以看到充電系統的各個方面,並試圖尋找導致過電壓故障的原因。這包括BSD交流發電機控制通訊線纜、輸出電壓、輸出電流及整流器或相繞組的評估。
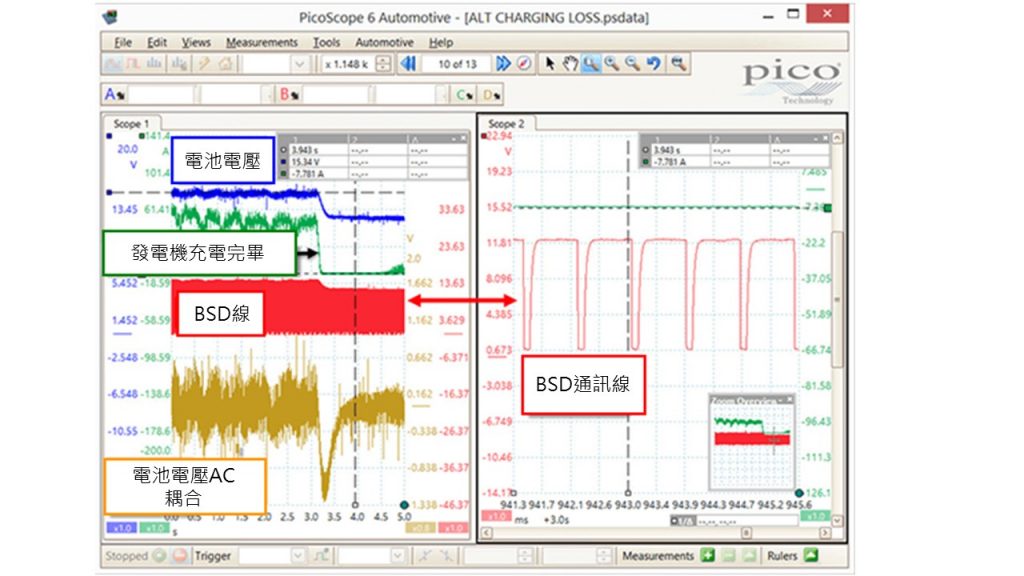
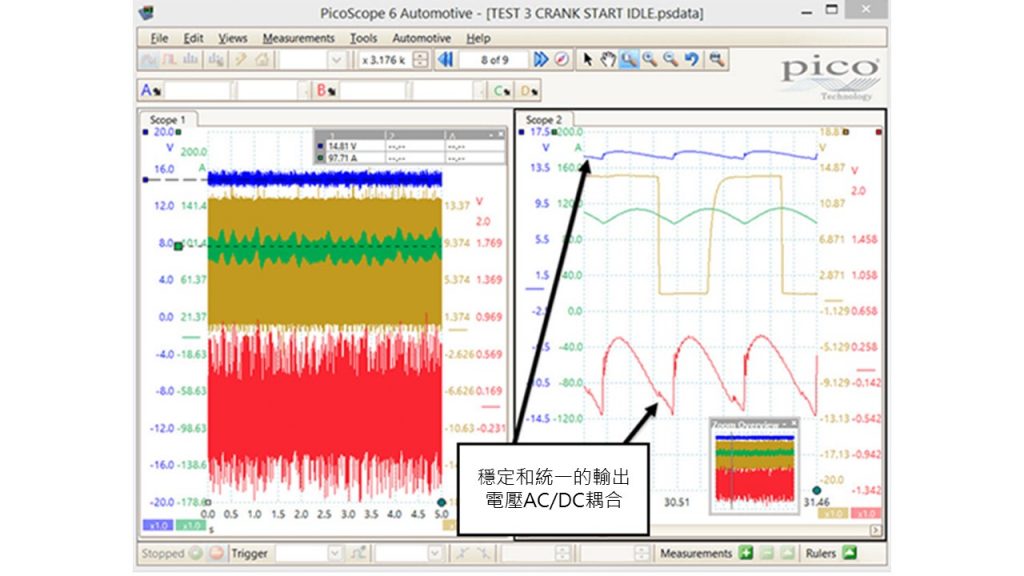
從上圖我們看到輸出電流曲線上有一個快速下降區即從60 amps 下降至-7amps ,這是充電線路中最異常的控制部分,而這會影響電池的電壓。同時我們希望能進行完全的充電控制,電池電壓的影響應該逐步防止燈光閃爍等不良副作用的產生。從波形上看,電池電壓在15.34V時似乎得到了大家一定程度的關注。
因此我們能否捕捉到過電壓情況及PCM關閉充電系統的操作?
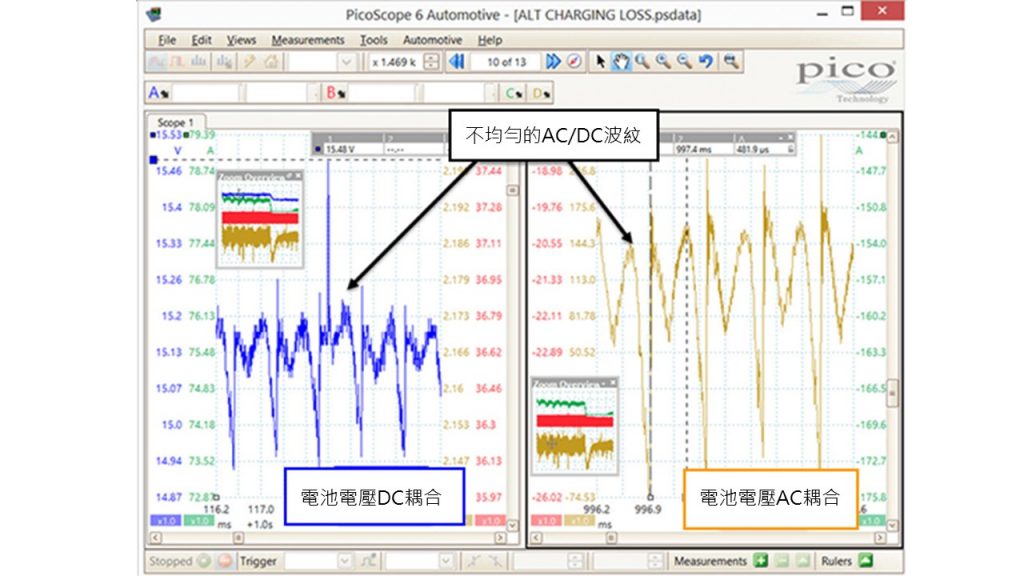
對通道A和D對應波形進行縮放(電池電壓,AC和DC耦合)我們能夠對帶有二極管/整流裝置的交流發電機的相繞組進行評估。同時通過週期性峰值能看到一定的特點,來自交流發電機預期輸出的典型交流波紋是不均勻的,並且電池電壓直流耦合也出現不均勻。這一定表示一個內部交流發電機組件故障或負責充電輸出的裝配磨損,但仍不排除控制系統是導致過電壓的原因。
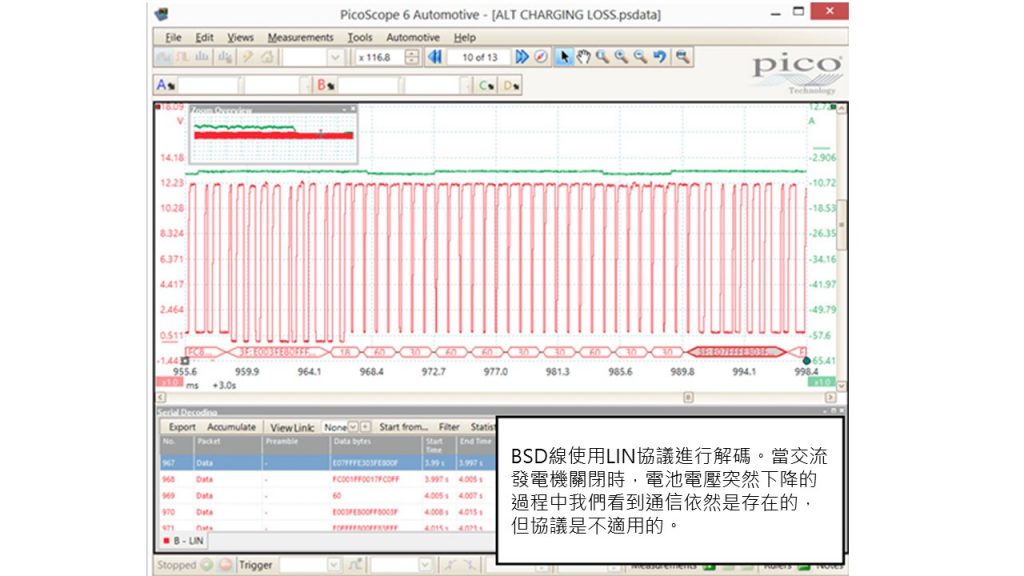
我們知道BSD線是負責交流發電機輸出的(接收來自PCM的命令)BSD波形可使用PicoScope解碼功能進行解碼,並試圖利用突然關閉(上面捕捉到的)狀態下的來自交流發電機的解碼信息來辨識故障。使用LIN協議解碼BSD線可以看到交流發電機和PCM之間的持續通訊,因為PicoScope能夠在關閉交流發電機後解碼數據包。
不幸的是,我們沒有辦法將解碼的數據轉換為其他可利用的事情,除了能夠證明通訊是存在的。BSD線為BMW品牌提供特殊的信息,並使得BUS電壓水平與LIN BUS電壓水平相同,但是兩者解碼的數值卻是完全不同的。
在關於這一點的所有測試中,我們已經證明交流發電機的內部研究,但是我們無法明確排查PCM或IBS(診斷計劃的第6,7項)。
我們的建議是聯繫當地的BMW經銷店詢問他們是否具有相關設備,並利用他們的診斷設備進行BSD線的解碼或使用“動態測試”功能驅動交流發電機(解碼器通過模擬BSD線發送訊息來命令高或低的充電輸出)。令我驚訝的是,經銷商的解碼器沒有這樣的功能,所以在診斷的這一階段我們現在都處於相同的處境。
現在市場上的有些工具能夠模擬充電控制命令如BSD、LIN和PWM信號等。它們用於進行交流發電機的評估,這些昂貴的工具通常由修理代理商購買,並在修復過程中體現了這些工具價值。
經過幾個小時的學習我能夠得到一條寶貴的訊息,而這簡單證明了交流發電機才是導致過電壓的根源。如果PCM與交流發電機之間的BSD通信失敗會發生什麼事情?電池會放電並且車輛會損壞嗎?答案是:不會!
PCM與交流發電機之間的BSD線路是否應該成為開路,交流發電機具有“機械感知”控制且如傳統的機械感知設備般監測內部電荷輸出。
擁有這些信息後,將BSD線從交流發電機移除,並且使用PicoScope通過OBD插口對電池電壓進行監測。這裡我們能夠記錄較長時間內的電池電壓波動。
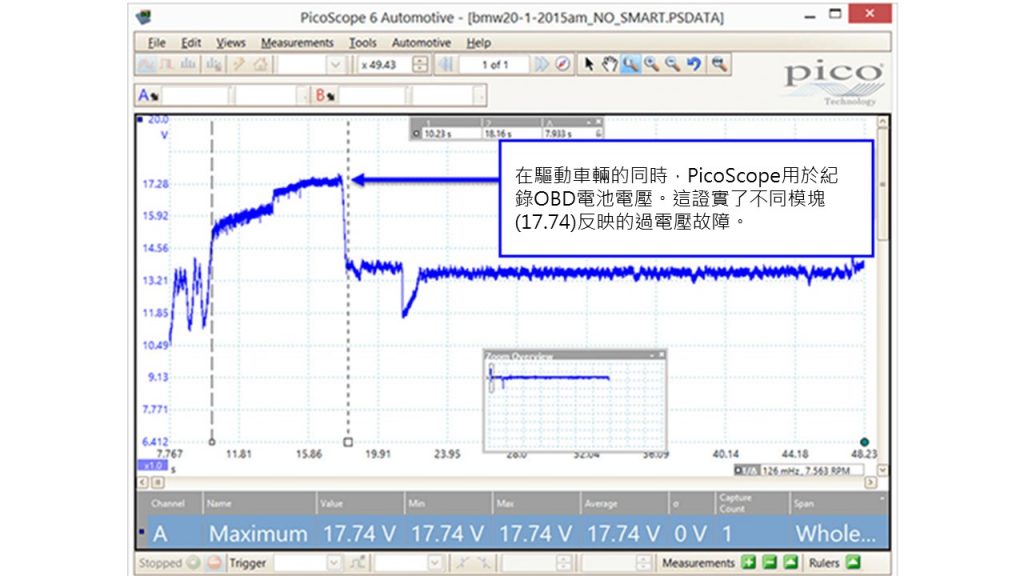
最後,確鑿的證據證明了過電壓是由於發電機內部監管失敗造成的,而不是由於BSD控制的原因(超過17V無法捕捉來自BSD線的輸入)。現在移除BSD線並充滿信心的檢測交流發電機。

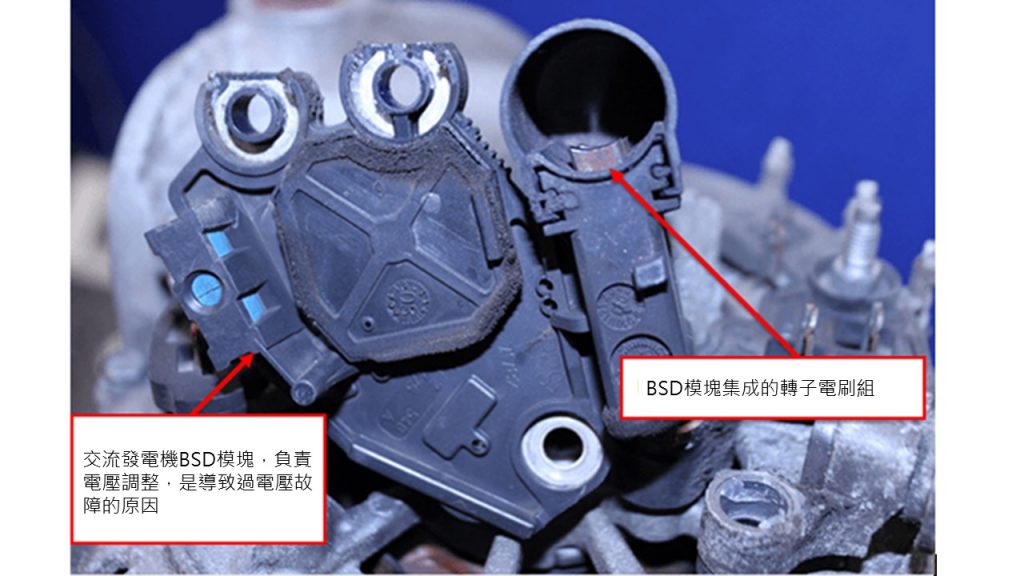

進一步檢測交流發電機,沒有過熱或灼傷的痕跡,但是從轉子滑環中可以看出“開槽”處磨損嚴重。這種狀況可以說明充電穩定性的問題,並導致不均勻的模式,這些我們能夠在交流發電機輸出電壓交流耦合的情況下看到。
我毫不懷疑導致過電壓狀況的根源可以通過單獨替換BSD模塊得到解決,但是移除和替換交流發電機需要勞動力,並且滑環上會出現磨損,為了未來的可靠性更換發電機是最有效的修復手段。
診斷結論:
以上波形證明了成功的修復案例需要穩定和統一的輸出電壓,不管交流電還是直流電耦合(電池電壓穩定在14.81V )。
這個案例研究使我對輸入電壓操作模塊的脆弱性有了更進一步的認識。該模塊對車輛控制系統的影響是戲劇性的,輸入電壓不僅太低而且也太高。交流發電機是我們常見的一個部件,因此並不擔心與它相關的診斷問題。然而,隨著技術的不斷發展,充電系統控制將會變得更加複雜,並且毫無疑問,集成到車輛網絡中後將會更有效率。