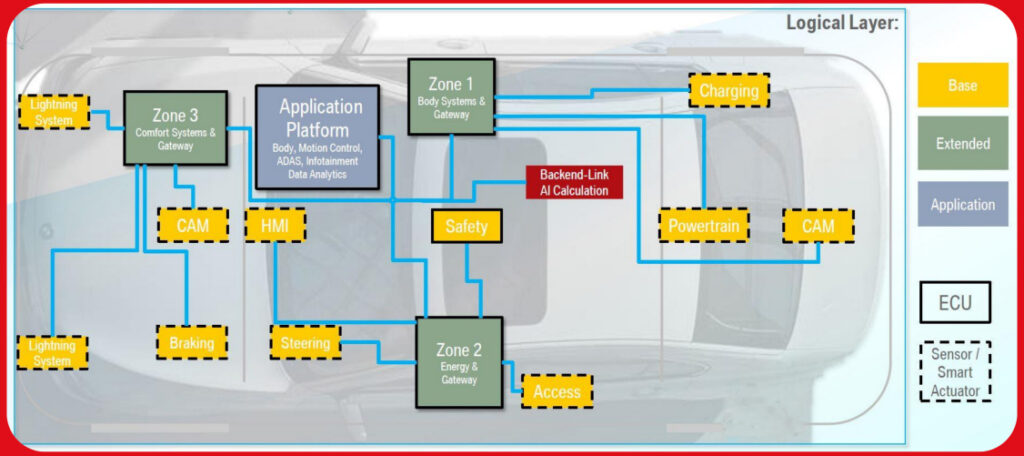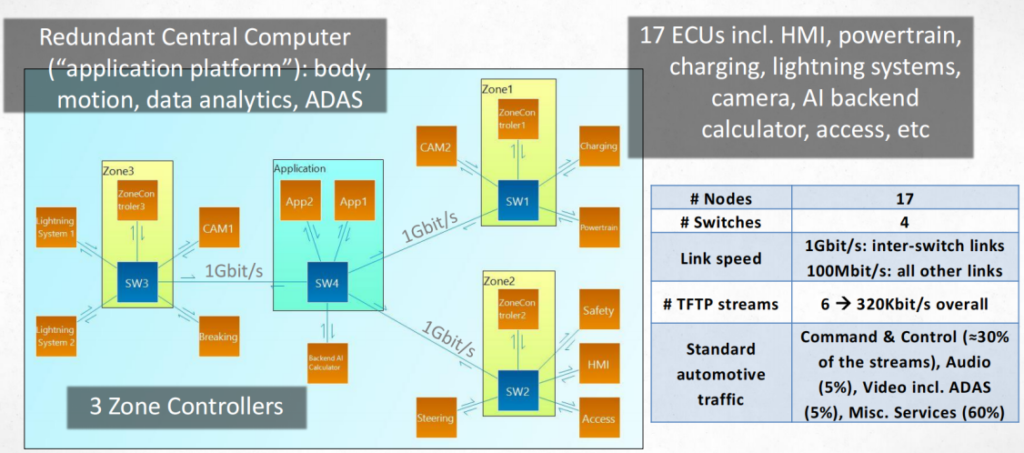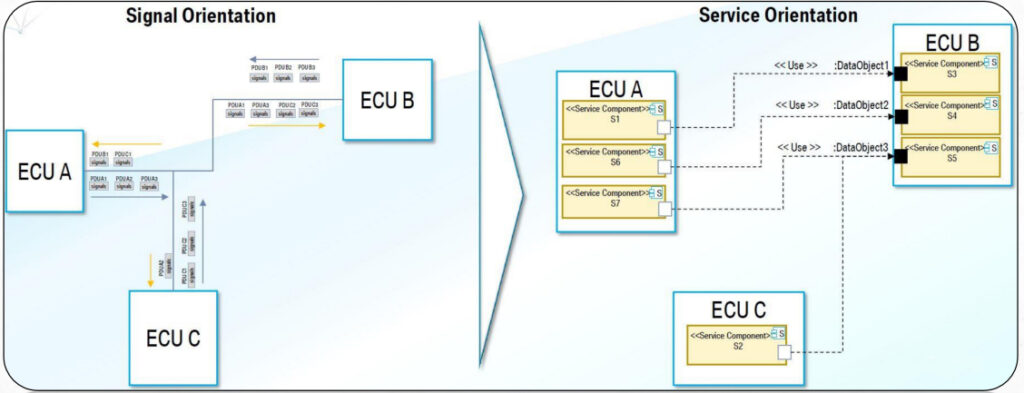


Service-Oriented (SOA) Automotive TSN Network Architecture
RTaW-Pegase
Comprehensive simulation and design software for TSN networks
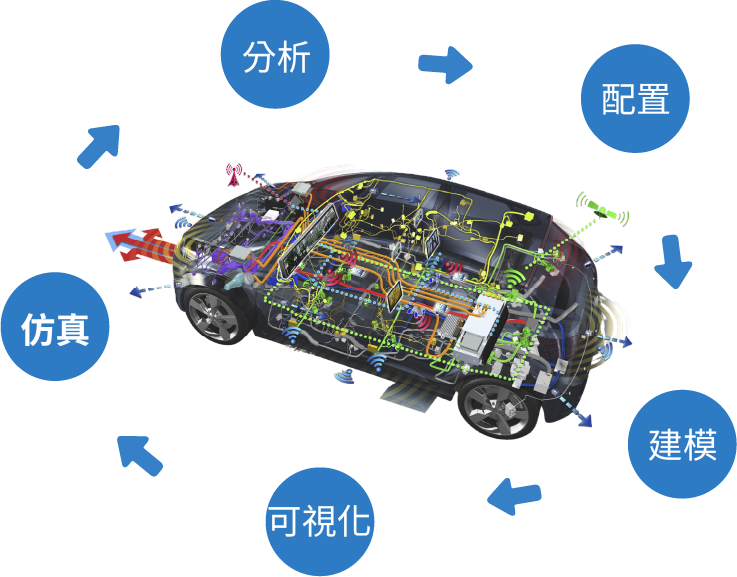
RTaW-Pegase® is a solution for modeling, automated configuration and simulation of automotive communication network architectures to support design selection and validation throughout the automotive lifecycle.
- Modeling: Design Elements Describing Network and Communication Requirements
- Configuration: Automatically configure CAN FD prioritization, packet scheduling, preemption prototypes
- Analysis: Worst-case scenario with network algorithms to analyze and validate hard real-time constraints
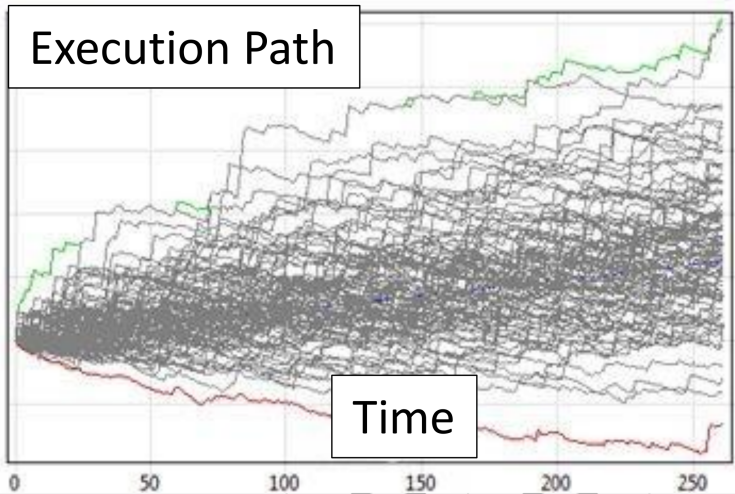
- Visualization results: Understanding network timing behavior, such as cross-link and network transport Gantt charts
- Simulation: Validation of complex timing constraints and timing accuracy simulation
Checking Performance and Reliability
Time-accurate simulation simulation and mathematical theory analysis
Reduce time-to-market costs
Auto-configuration algorithm for QoS parameters for all networks
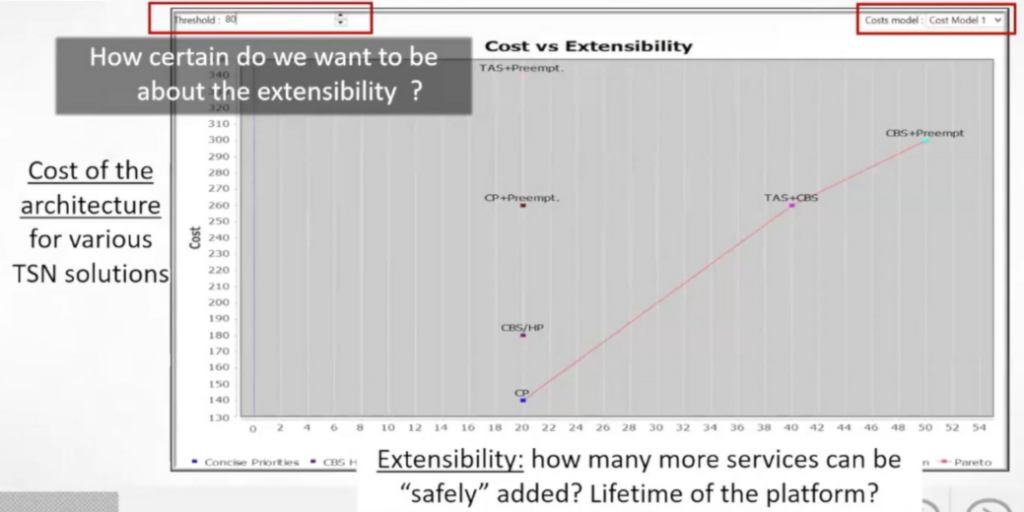
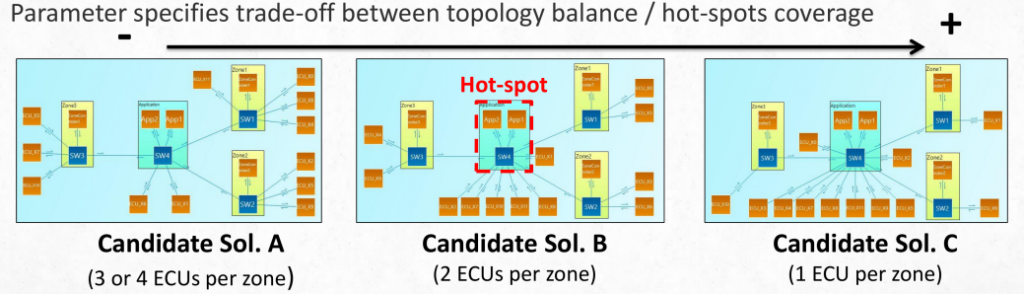
E/E Framework Cost Optimization
Better use of hardware and software resources
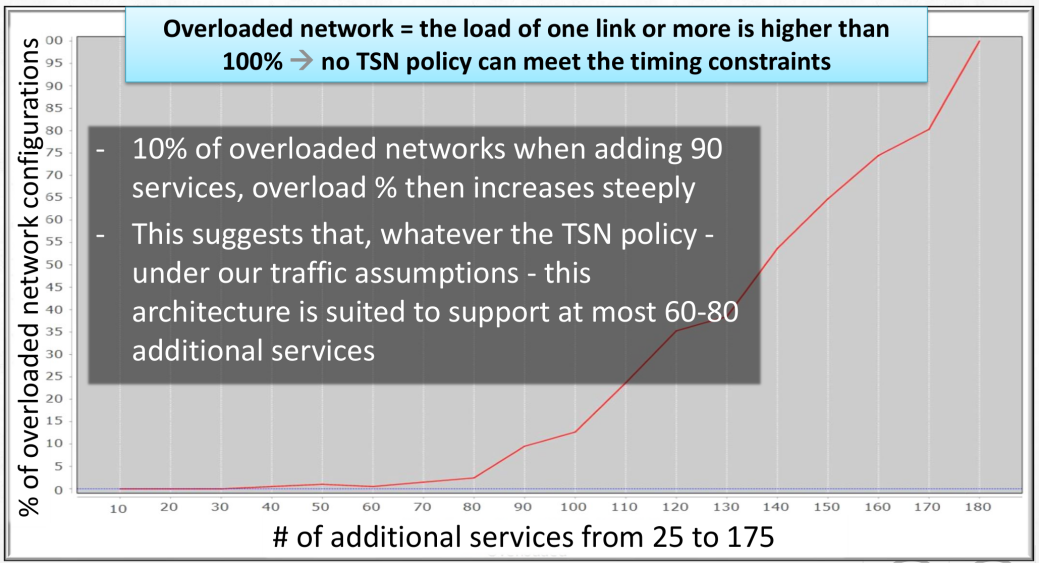
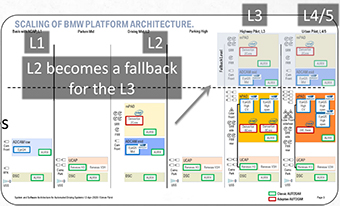
Design for the Future
Quantifying the additional network traffic that can be added
Trusted Results
RTaW-Pegase has been used by industry leaders for more than 10 years