
I. Case background
APM Terminals handles up to 50 million tons of cargo each year. Under the pressure of this huge volume of freight, Zeebrugge uses a machine called a "straddle loader," which, as its name suggests, can be stacked in up to four pallets, with operators sitting on top of it to see the whole picture. As the straddle carriers move around the terminal, it is difficult for the central management unit to know the status of each piece of equipment, including fuel consumption, fuel level, battery voltage values, how the straddle carriers are being loaded, and more importantly - where is it located? For APM to track the movement of the cross carriers, it needs to install a wireless system to communicate between the cross carriers and the office. The problem is that APM uses a CAN-based bus internally that cannot communicate with the Modbus-TCP-based monitoring system that sends the data to the office.
II. Solutions
APM found a system integrator that specializes in solving communication problems between different PLC systems and industrial equipment. They found the Anybus X-Gateway gateway to be an effective solution.
“After three months of testing, we found Anybus to be very easy to use, plus the real advantage of Anybus is that Communicator can be reconfigured, meaning that by simply changing the address, we can instantly port the new Communicator to another cross carrier.”
APM Terminal Control Engineer
APM believes that Anybus Communicator CAN is ideally suited to handle conversions between CAN-based networks and ModbusTCP networks across 22 carriers. Anybus Communicator CAN efficiently connects the switch between the CAN bus and Modbus TCP networks across the carriers through pre-installed hardware and software configuration tools.

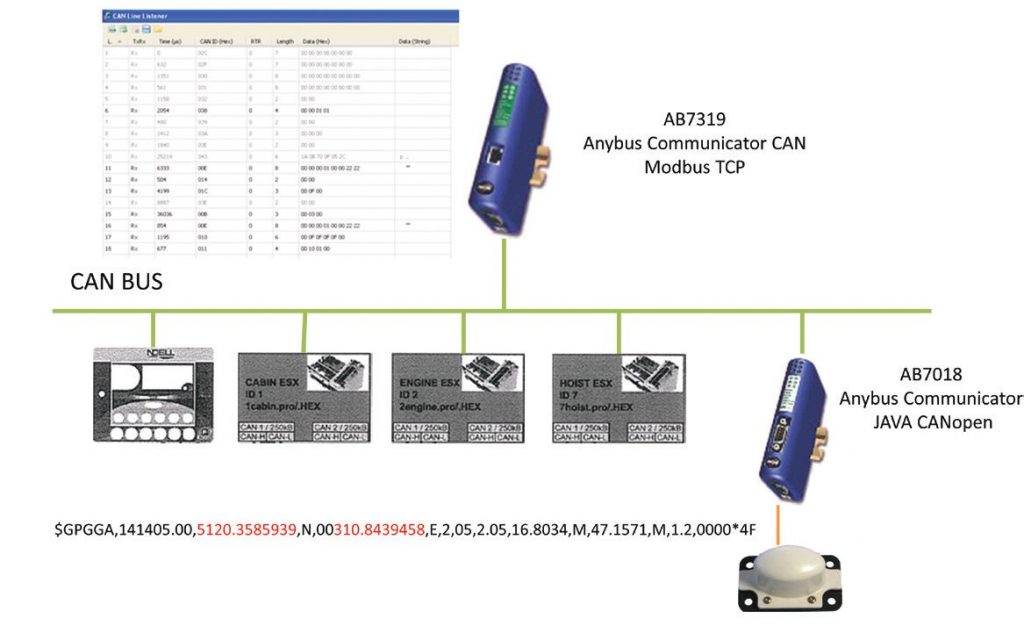

Anybus comes preconfigured with Configuration Manager, a Windows-based configuration software that allows APM to specify exactly how messages should be delivered. Installation of Anybus Communicator took only an hour or two over several days and allowed 22 cross-carriers to communicate with the centralized monitoring system. What's also great about Anybus Communicator is its flexibility in terms of configuring the parameters we need to adjust, and Anybus Communicator CAN support for both 11-bit and 29-bit identifiers is one of the keys to success.”
Another problem that needs to be solved is that the GPS tracker uses the RS232 based NMEA 0183 protocol and cannot communicate with the CAN bus. An Anybus gateway can also provide this solution. With the Anybus Communicator - CANopen (AB7003), it is possible to connect the CAN-based cross-carrier to the NMEA 0183-based GPS system. APM can now effectively monitor the status of all cross-carriers, including fuel status, exact position, wind conditions, etc. More importantly, the system is able to monitor the status of all cross-carriers, including fuel status, exact position, and wind conditions. More importantly, the system allows APM's maintenance team to stay on top of safety conditions and know in advance what they need to do on each transporter, saving a lot of time and reducing the risk of accidents.




