一、引言
在自動駕駛系統運作過程中,多感測器(如相機、光達等)所採集、且具備精準同步時間戳的資料,是支撐高精度感知、定位、決策與路徑規劃的關鍵基礎。因此,在自動駕駛資料採集系統中,感測器與主控平台之間,通常會透過PTP時間同步機制,以確保多感測器之間的硬體層級時間一致性。
然而,在實際與客戶專案對接與系統開發過程中,仍普遍面臨時間同步精度不足、多感測器時間戳不一致、系統部署流程複雜,以及資料品質難以有效控管等問題,使多感測器資料的整合與應用受到限制。
宏虹長期投入多感測器資料採集解決方案的設計與實務應用,於實際協助客戶解決問題的過程中,累積了豐富的時間同步導入與優化經驗。本文將聚焦PTP時間同步協定在感測器與主控平台間的實際應用,分享相關系統架構、實作重點與實務經驗,提供讀者作為導入與評估的參考。
二、相機與工控機的時間同步架構
PTP時間同步架構
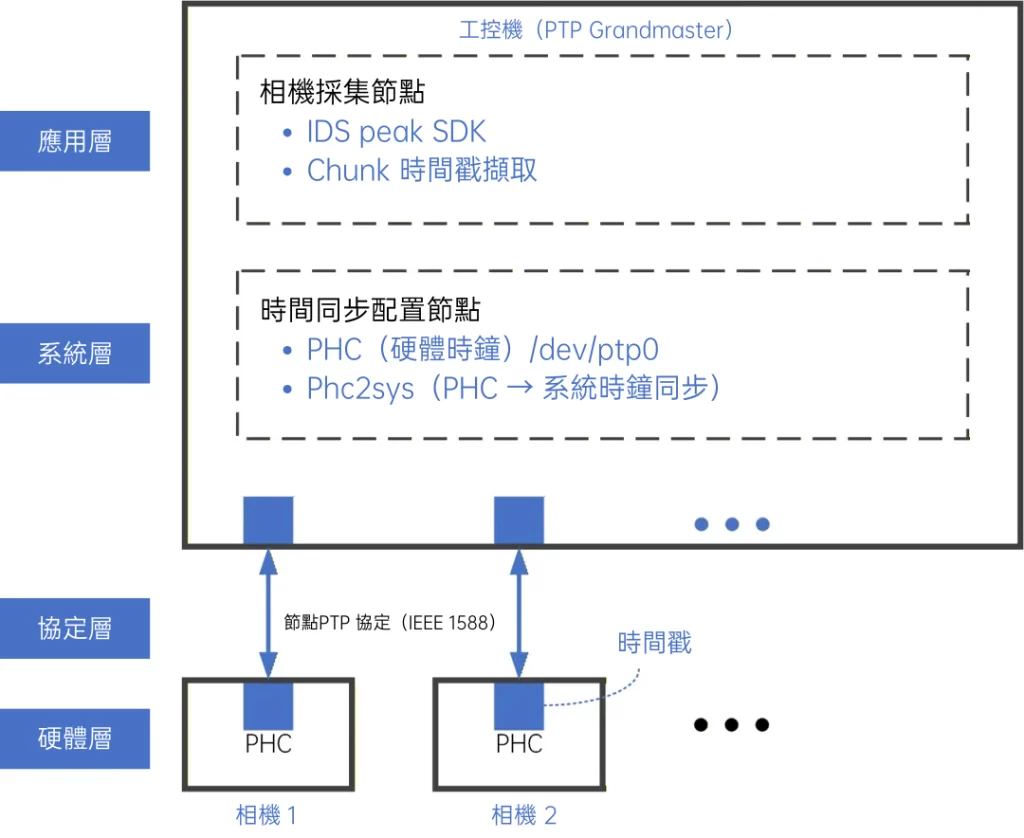
以下以相機與工控機之間的PTP時間同步部署為例說明。相機端於資料採集端透過乙太網路介面(支援PTP)進行連線,工控機端則配置對應的乙太網路介面(支援PTP),共同建立以硬體時鐘為基礎的時間同步鏈路。
在多感測器應用情境中,光達設備亦多透過車載乙太網路(支援PTP或gPTP)完成時間同步,使相機、光達與主控平台之間可共用一致的時間基準。此一架構可同時滿足實際部署需求,並對應本文後續說明的相機同步實作方式。

PTP時間同步可概略拆分為以下四個層級:
硬體層
仰賴網卡內建的PHC(Precision Hardware Clock)硬體時鐘,在封包收發的實體層或資料鏈結層進行時間標記,避免因作業系統或應用層延遲影響同步精度。協定層
依據IEEE1588PTP協定,透過Sync/Follow_Up與Delay_Req/Delay_Resp封包,完成主從時鐘同步與鏈路延遲量測,確保時間基準可精準對齊。系統層
透過phc2sys工具,將PHC硬體時鐘同步至Linux系統時鐘(CLOCK_REALTIME),確保作業系統層級的時間基準與PTP硬體時鐘保持一致。應用層
於影像資料接收端,透過Chunk資料機制讀取PTP硬體時間戳,並以int64格式儲存,維持微秒級時間精度,且直接關聯至每一張影像資料。
三、多網口同步設計
在多相機或多感測器應用情境中,工控機通常會透過多個網路介面與各感測器連線。此時,每一個網口皆需各自運行獨立的ptp4l實例。若同步角色與來源設定不當,容易導致多個ptp4l實例同時嘗試成為Master,進而造成時間基準不一致的問題。
為解決上述情況,系統採用系統時鐘中樞同步架構,以Linux系統時鐘作為全系統的統一時間基準,並透過phc2sys工具,實現多網口PHC(Precision Hardware Clock)的層級化同步。
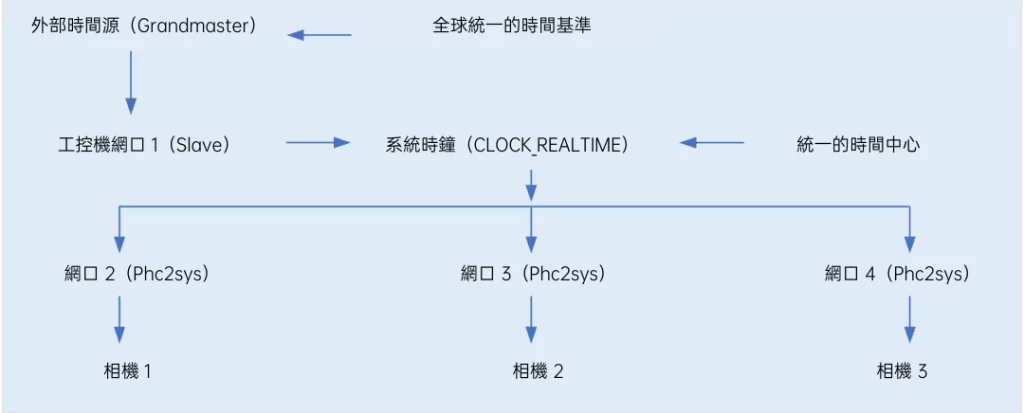
在此架構下,外部時間來源(Grandmaster)首先將時間同步至指定網口的PHC,再由該PHC同步至系統時鐘(CLOCK_REALTIME),形成單一且穩定的時間中心。其餘網口則透過phc2sys,將各自的PHC同步至相同的系統時鐘,確保所有網口與下游感測器共用一致的時間基準。
在實際實作過程中,所有網口的PHC皆會透過phc2sys同步至系統時鐘,以確保全系統時間一致性。各網口對應的ptp4l實例僅負責對下游感測器進行時間同步,並維持其所屬PHC的穩定運作。由於所有PHC最終皆對齊至同一系統時鐘,可有效避免多個ptp4l實例之間產生同步衝突。
此外,phc2sys可透過-wparameters自動取得UTC時間偏移量,無需額外手動設定,可降低人工設定錯誤所導致的時間偏差風險,進一步提升整體同步穩定度。
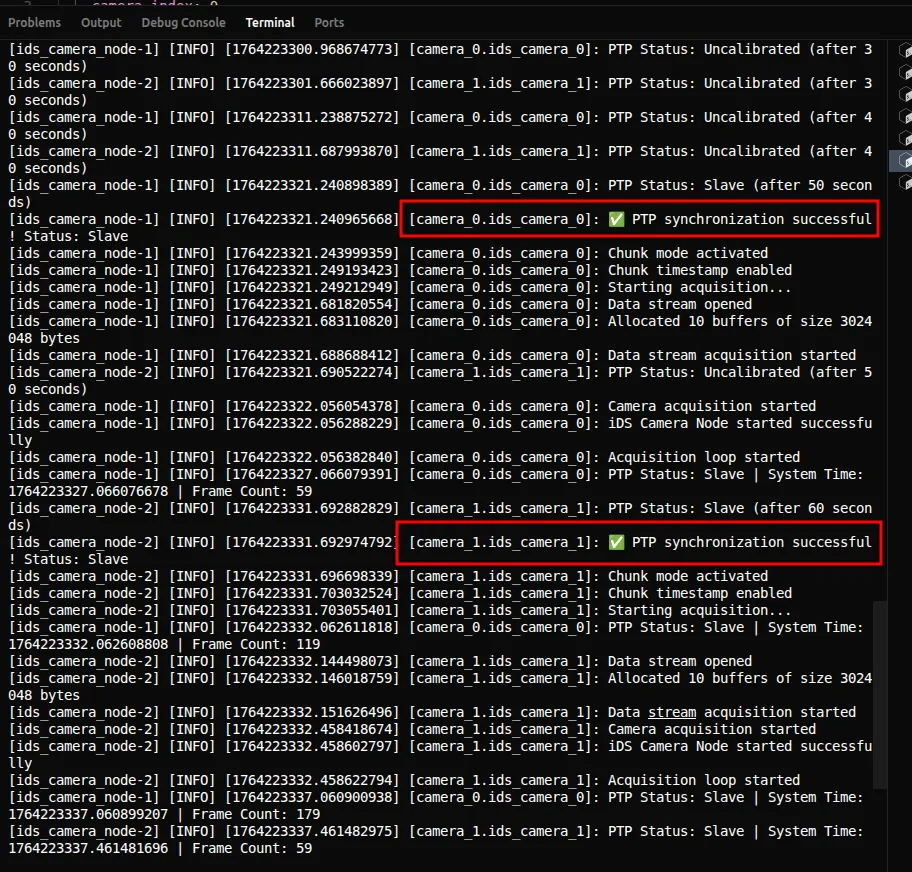
四、PTP 狀態監控機制
為確保時間同步流程穩定可靠,系統實作完整的PTP狀態監控機制,可即時追蹤各節點的同步狀態與進度,並於同步過程中提供即時回饋與判斷依據。
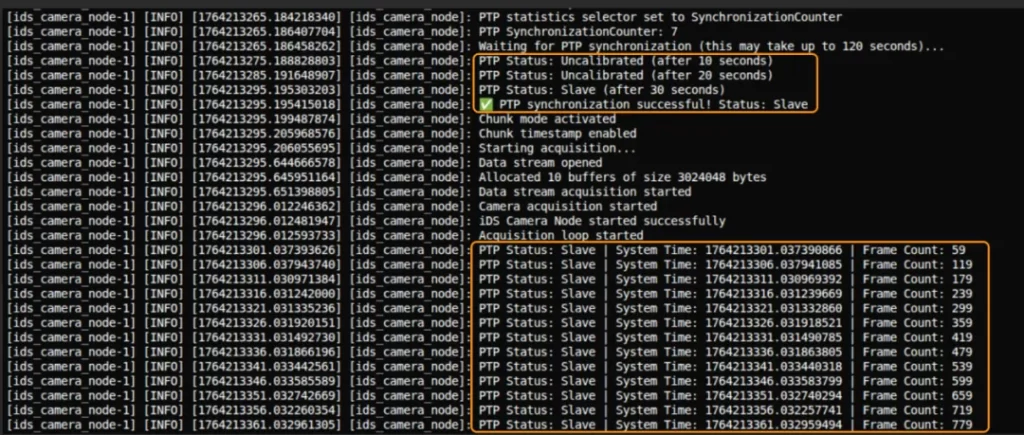
系統會持續監控PTP狀態轉換流程,包含初始化、校準與正式同步階段,並於達成穩定同步後,確認節點進入可正常運作的狀態。
狀態轉換流程:Initialization → Uncalibrated → Listening → Slave
狀態監控頻率:每10秒檢查一次同步狀態,提供即時回饋
同步等待機制:可設定同步逾時時間(預設120秒),確保感測器具備足夠時間完成同步
診斷資訊輸出:即時顯示PTP同步精度、系統時間、節點ID與同步計數器等關鍵資訊
透過上述監控機制,可在系統啟動與運行階段即時掌握PTP同步狀況,並於同步異常時快速定位問題,提升整體部署穩定度與維運效率。
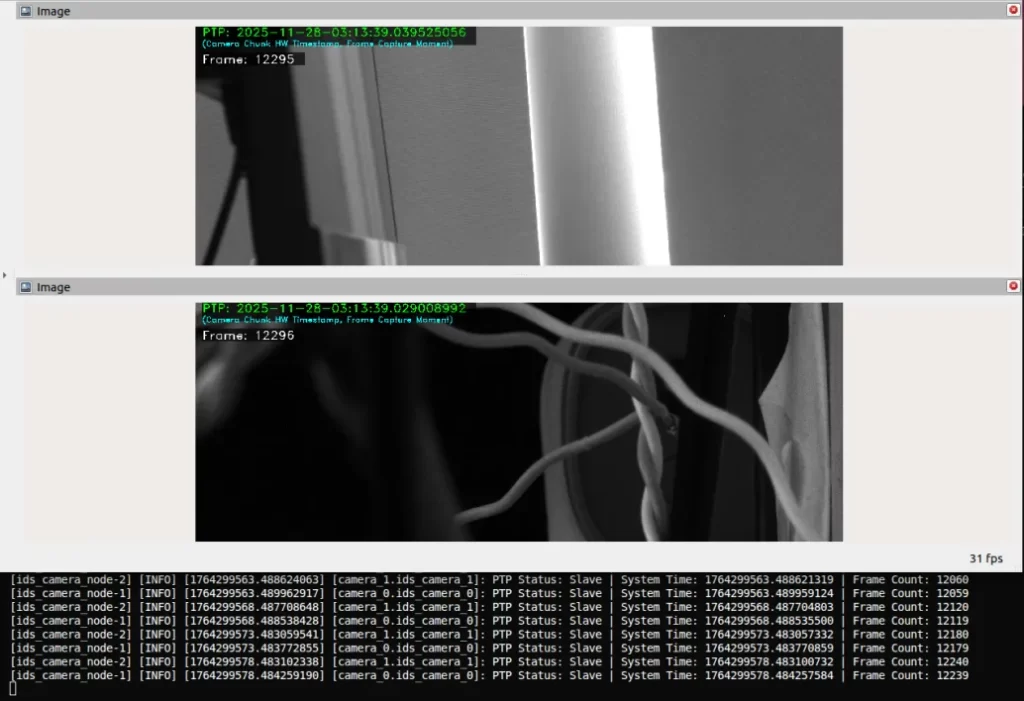
五、可視化驗證與同步精度評估
為了進一步呈現硬體時間同步效果,在測試過程中,我們將每張影像的時間戳資訊疊加顯示於影像畫面上。採用多網口同步架構後,兩組相機於啟動完成後,皆可正常進入PTP硬體時間同步狀態。隨著系統運行時間增加,影像中的Frame計數亦會持續累加,可觀察到在累計超過1.2W+Frame後,PTP時間同步狀態仍維持穩定。
此外,影響時間同步精度的另一項重要指標為時間偏移量,即系統時鐘(CLOCK_REALTIME)與PHC硬體時鐘之間的時間差異。經實測可觀察到offset(單位:ns)的最大值約為48147ns(約48μs),最小值約為-36840ns(約-37μs),整體波動範圍約為85μs(48μs至-37μs)。在偏移量長時間穩定控制於±50μs以內的情況下,系統時鐘與PHC硬體時鐘之間的同步精度,已可滿足多感測器同步應用需求,因此本同步架構於實際部署中具備可行性。
六、結語
本方案以PTP為核心,建構一套適用於自動駕駛與多感測器資料採集系統的時間同步架構。透過多網口PHC硬體時鐘中樞同步設計,結合phc2sys工具、即時PTP狀態監控與異常處理機制,於實際專案中成功實現微秒級時間同步精度,並有效解決多感測器時間不一致、同步精度不足與系統部署複雜等常見問題。
此外,藉由YAML參數化設定、自動化部署腳本與完整文件化流程,系統可彈性支援從單一相機到多相機、多感測器的擴充需求,顯著降低導入門檻與維運負擔,同時確保系統於長時間運行下仍具備穩定且可驗證的同步表現。
在多感測器系統中,時間同步不僅是功能需求,更直接影響資料可信度與系統可擴展性。若您正規劃或導入多相機、多感測器資料採集系統,並希望在同步精度、系統穩定性與部署效率之間取得平衡,宏虹可依實際應用情境提供架構評估與實務建議,協助您將時間同步從「難以控管的風險」,轉化為「可預期、可驗證的系統基礎」。
Learn more about our products

B-plus 自動駕駛數據獲取平台
精準擷取、高穩定,打造自動駕駛數據獲取與分析平台
宏虹b-plus專為自動駕駛與 ADAS 開發、測試與驗證場景所設計。平台可同步擷取車載乙太網路、CAN/CAN FD、感測器與影像資料,並確保高精度時間同步與長時間穩定記錄,廣泛應用於道路測試、實驗室驗證與系統整合測試,協助建立可追溯、可分析、可驗證的自動駕駛資料流程。
即插即用的數據獲取架構:快速整合車載乙太網路、CAN/CAN FD 與感測器資料,降低系統建置與部署成本
支援高頻與大頻寬資料流:滿足自動駕駛感測器、影像與控制訊號的高速資料擷取需求
高精度時間同步機制:支援 PTP/硬體時間戳,確保多感測器資料可正確對齊與融合
跨平台系統相容性:支援 Windows、Linux 等作業系統,可整合既有測試與開發環境
穩定長時間記錄能力:適用於道路實測與耐久測試,確保資料完整性與可靠性
Honghong will provide you with any support you need!
Our professional Honghong team will be the first to respond and provide you with the best service to solve all your problems.