



CANedge1: 2x CAN data logger (SD + RTC + GPS/IMU)
Functional overview:
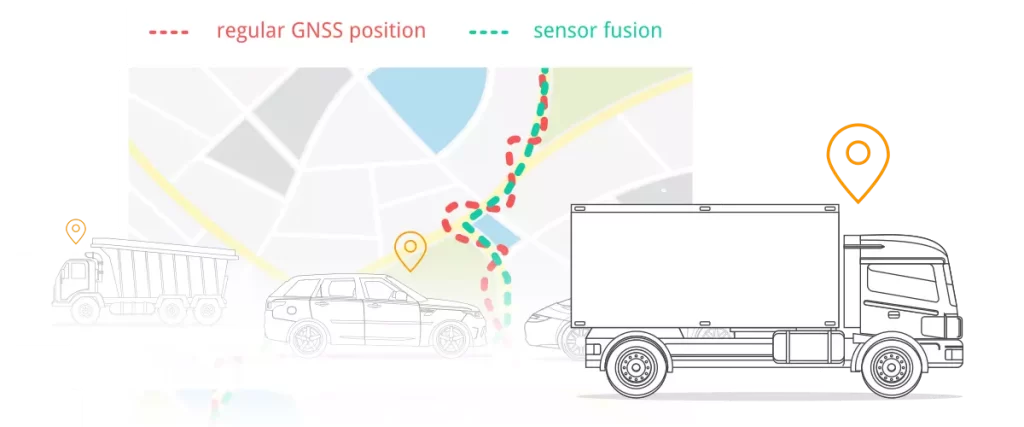
The CANedge1 is a high performance 2xCAN data logger supporting CAN FD and LIN channels with built-in GNSS and 3D IMU for vehicle testing and diagnostics. The device supports plug-and-play, automatic bit rate detection and silent mode, records 8-32 GB of SD card data, and features 50 µs accuracy RTC and highly accurate GNSS/IMU data fusion. Free open-source tools support data conversion and analysis for a wide range of application scenarios, making it a cost-effective professional solution.
Description












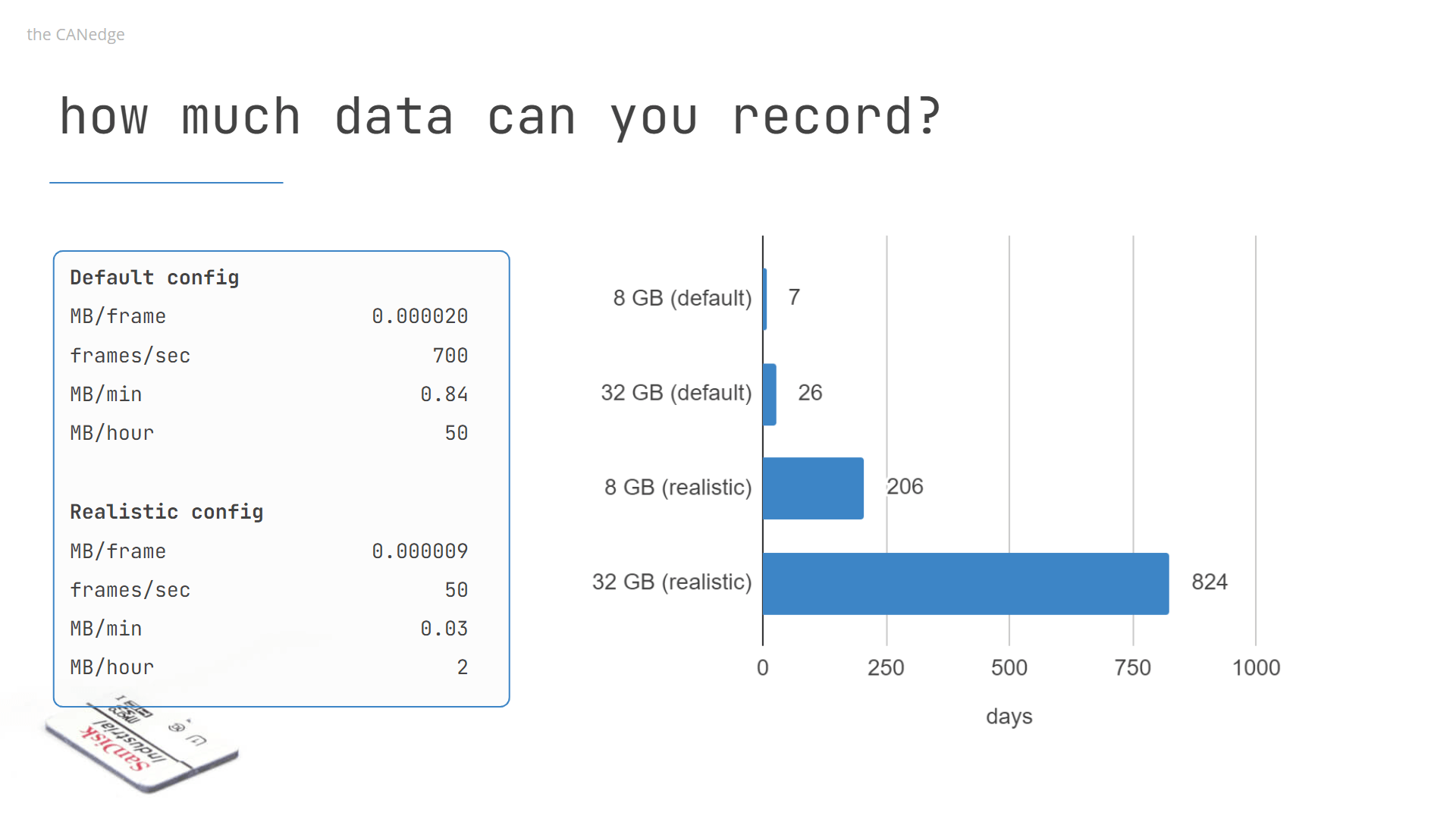
The size of the original MF4 journal file depends on the application and the amount of data you want to record.
The following overview shows a typical example of a heavy-duty truck (J1939 data) with a display speed of 700 frames per second. Obviously, if you record everything, an 8 GB SD card will allow you to record data 24/7 for about 7 days, and 32 GB for about 26 days.
However, CANedge supports powerful options for optimizing the size of log files. Therefore, a more realistic scenario is shown below, where for example a 32 GB SD allows you to log more than 800 days.
Below we have listed some of the key features that will allow you to optimize your journal entries:
- Compression:Enable compression to reduce data size by 50-80%
- Filter:Specify CAN IDs to record/ignore (through range and mask)
- Pre-scaler:Instead of recording frames at their "original" frequency, you can customize the frequency with the CAN ID.
- Control signal:Specify when to start/stop recording based on specific CAN signal thresholds
If the SD is full, cyclic logging allows the CANedge CAN recorder to continue logging data by deleting the oldest log file first.
Compared to the CL2000, the CANedge1 CAN logger is superior at logging data to an SD card. However, CANedge1 does not support real-time streaming over USB. We recommend using the CL2000 for this type of use.
For a general introduction to CAN logging with CANedge, please refer to our45-minute webinar。
Below, we outline the basics of how to get started recording raw CAN data:
- Connect the CAN logger to the CAN bus (optionally with our adapter cable)
- The device boots up, detects the bit rate and starts recording raw data to the SD card.
- Disconnect the device, extract the SD and insert it into the PC.
• In asammdf GUI/APIetc. to open the original log file for theDBC Decodingand visualization
The CANedge1 CAN Bus Analyzer can record data for any high-speed CAN bus application (ISO 11898-2). In practice, this includes almost all vehicles (cars, trucks, tractors, forklifts, buses, motorcycles, electric vehicles, etc.) as well as all kinds of production machinery,Battery/BMS for Electric Vehiclesetc. Most aircraft and ships also use CAN buses. In terms of protocols, this includes SAE J1939、CANopen、NMEA 2000、 FMS、OBD2etc.
For the specific case of OBD2 vehicle data, CANedge1 can periodically transmit up to 64 customized CAN messages, meaning it can be used as an OBD2 data logger. Note that you will need to verify that your vehicle uses CAN as the basis for OBD2 communication (e.g. this is the case for all U.S. vehicles built after 2008). Also note that all cars support a different number of OBD2 parameters - CANedge1 will of course only log the supported data.
CANedge requires the use of specific industrial SD card models to ensure performance and power security. You can select either an 8 or 32 GB SD card as an option at checkout (or aPurchase alone)。
You should not use 3rd party SD cards as they may cause data corruption and other forms of non-functional behavior.






