
preamble
車載乙太網 gPTP 時間同步是自駕車與智慧汽車中不可或缺的基礎技術,你知道為什麼自駕車需要精確到 ±50ns 的時間同步嗎?在傳統 CAN 匯流排中,毫秒等級的同步精度足以支援一般控制訊號,但在自動駕駛的場景下卻遠遠不足。舉例來說,當車輛以 120 km/h 行駛時,僅 1 ms 的時間偏差,就可能造成 3.3 公分的空間誤差,直接影響感測器融合與線控底盤協同的可靠性。
為了解決這一問題,車載以太網 gPTP(Generalized Precision Time Protocol) 應運而生。它能提供 ±50ns 的同步精度,為雷射雷達、攝影機、毫米波雷達 等多感測器建立統一的「時間錨點」,確保資料融合與車輛決策的安全性。

gPTP 協定優化特點
相較於工業場景常見的PTP(IEEE 1588),gPTP 針對車用環境做了三項關鍵最佳化:
1.簡化 BMCA(最佳主時鐘演算法)
降低主從切換頻率,避免車載網路因拓撲頻繁變化而產生不穩定。
2.固定的訊息間隔
Sync 預設 125ms、Pdelay_Req 預設 1s,在確保精度的同時,減少對頻寬的佔用。
3.增強的時間戳機制
透過網卡硬體直接產生時間戳,降低電磁干擾對軟體時間戳的影響,提升精準度。
Linux PTP 工具鏈
簡單來說,LinuxPTP 並不是單一工具,而是一套模組化的時間同步解決方案。它的核心組件主要包含ptp4l、phc2sys 與 pmc,各自扮演不同角色:
ptp4l:是 gPTP 協定的核心實作,負責主/從時鐘角色的協商、時間訊息的收發、延遲量測與時鐘校正。支援邊界時鐘(BC) 與 普通時鐘(OC)兩種模式,能夠適配車載乙太網的層級拓撲架構。
phc2sys:用來解決硬體時鐘(PHC, Physical Hardware Clock)與作業系統時鐘(OS Clock)不同步的問題。由於車載 ECU 常同時具備 PHC 與系統時鐘兩個計時來源,phc2sys 透過 PI 調節演算法,將兩者偏差穩定控制在 10ns 以內。
pmc:作為 PTP 管理客戶端,可用來查詢時鐘狀態(例如 GET TIME_STATUS_NP)、修改參數設定(如 SET PORT_PROPERTIES),相當於調試與監控過程中的「可視化窗口」。
以上這套工具鏈的一大優勢,是針對車載應用場景的適配性。它內建 automotive-master.cfg 與 automotive-slave.cfg 設定檔,預設已符合 IEEE 802.1AS-2011 標準 的關鍵參數(例如 transportSpecific=0x1、ptp_dst_mac=01:80:C2:00:00:0E),讓工程師無需從零開始調校,大幅降低時間同步部署的複雜度與成本。
gPTP 工程實務
- 時間同步硬體選型
在從協定走向實際應用的過程中,gPTP 首先需要確保硬體能滿足「時間敏感」特性,核心指標如下:
PHC 硬體時鐘:必須支援 IEEE 1588 硬體時間戳,才能確保時間基準的高精度。
網卡驅動:需支援
SOF_TIMESTAMPING_TX_HARDWARE與SOF_TIMESTAMPING_RX_HARDWARE兩項標誌,確保收發時間戳由硬體直接產生,而非透過軟體計算,以避免軟體堆疊延遲造成的誤差。工程師可透過ethtool -T eth0指令進行驗證。
主從時鐘配置要點
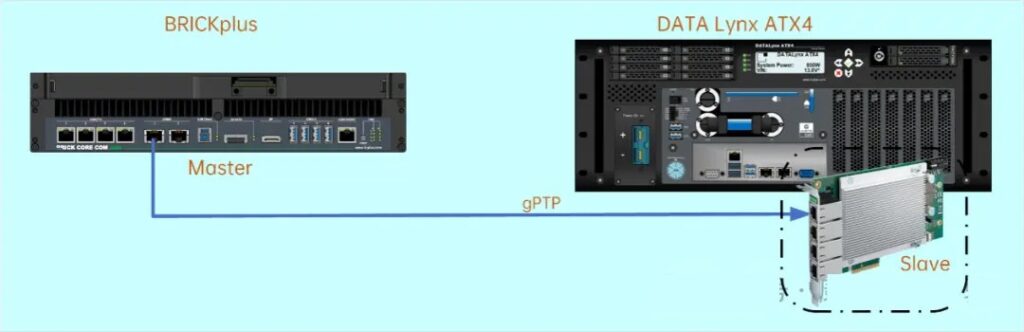
在車載乙太網架構中,時間同步採用「主從架構(Master-Slave)」。其核心是透過設定檔(Configuration File) 明確定義各節點角色與行為邊界。
如以下示意案例,以工業電腦(IPC) 搭建的車載網路,就能完成 gPTP 時間同步的基本配置:
主時鐘配置(automotive-master.cfg)
通常部署在域控制器或中央閘道器,需重點配置:
gmCapable=1:聲明具備「全局主時鐘(GM)」能力;masterOnly=1:強制為主模式,避免 BMCA 演算法導致的角色切換;logSyncInterval=-3:同步訊息間隔設為 125ms(2^-3 秒),平衡精度與頻寬;delay_mechanism=P2P:採用點對點延遲機制,減少多節點級聯的誤差累積。
啟動命令需指定介面與設定檔:
sudo ptp4l -i eth0 -f automotive-master.cfg -m (-m 參數用於輸出詳細日誌,便於調試)

從時鐘設定(automotive-slave.cfg)
通常部署在感測器節點、致動器 ECU,關鍵設定包括:
slaveOnly=1:固定為從模式,避免搶占主時鐘角色;step_threshold=1:允許時間跳變校準(初始同步階段);servo_offset_threshold=30:當偏差超過 30ns 時啟動 PID 調整;ignore_source_id=1:忽略主時鐘來源 ID 變化,提升容錯性。
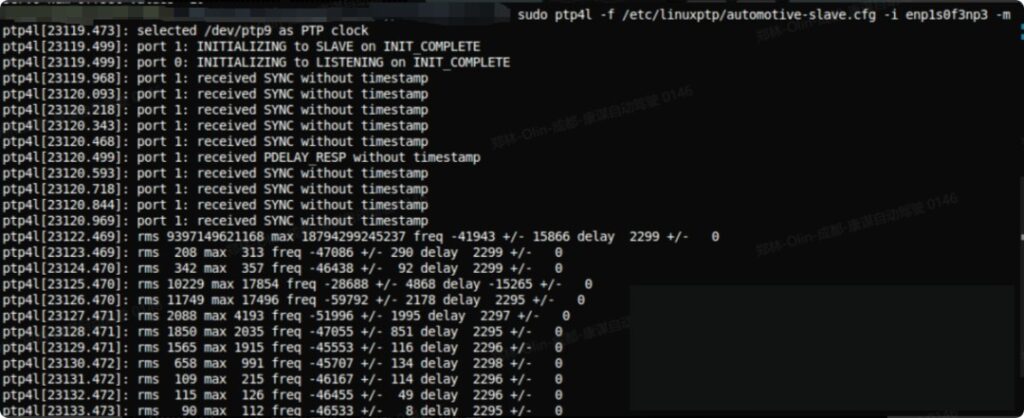
啟動後需透過 pmc 指令 驗證同步狀態:
pmc -u -b 0 -d 1 “GET TIME_STATUS_NP”
在正常狀態下,offsetFromMaster 應穩定維持在 ±50ns 以內。
系統層級同步(PHC 與系統時鐘對齊)
當 ptp4l 完成 PHC 硬體時鐘的同步後,若 ECU 的 系統時鐘(如 Linux CLOCK_REALTIME)與 PHC 脫節,應用層仍可能取得錯誤的時間。這一步可透過 phc2sys 工具解決:
sudo phc2sys -s eth0 -c CLOCK_REALTIME -O 50 -m
-s eth0:以網卡 PHC 作為時間來源;-c CLOCK_REALTIME:將時間同步至系統時鐘;-O 50:設定偏移量容許範圍為 50μs,避免 phc2sys 因過度頻繁的調整造成不必要的負載;-m:輸出校準日誌。
在調試過程中,需特別關注 offset 數值(PHC 與系統時鐘的偏差)。當系統穩定後,應保持在 ≤10ns。若偏差過大,需檢查系統負載情況(例如 CPU 使用率過高可能影響校準精度)。
Conclusion
在車載乙太網的技術架構中,gPTP 雖不像 CAN FD 或 SOME/IP 那樣直觀可見,卻如同「神經系統」般,支撐著整個系統的協同運作。
LinuxPTP 作為一套開源工具鏈,為 gPTP 的工程落地提供了低成本的途徑。然而,從協定到實務應用,仍需經過硬體適配、主從時鐘設定、系統層級同步 等多個步驟,才能真正達到高精度時間同步的需求。
 想深入瞭解車載乙太網 gPTP 時間同步解決方案嗎?
想深入瞭解車載乙太網 gPTP 時間同步解決方案嗎?宏虹電子提供完整的車載網路測試工具與技術支援,協助企業快速落地高精度時間同步。
Honghong will provide you with any support you need!
Our professional Honghong team will be the first to respond and provide you with the best service to solve all your problems.


