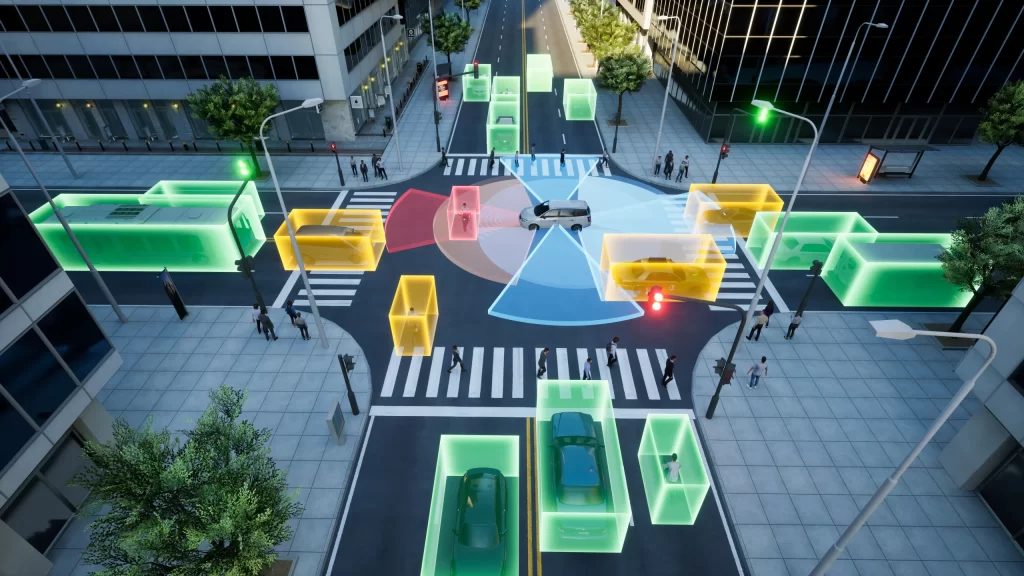
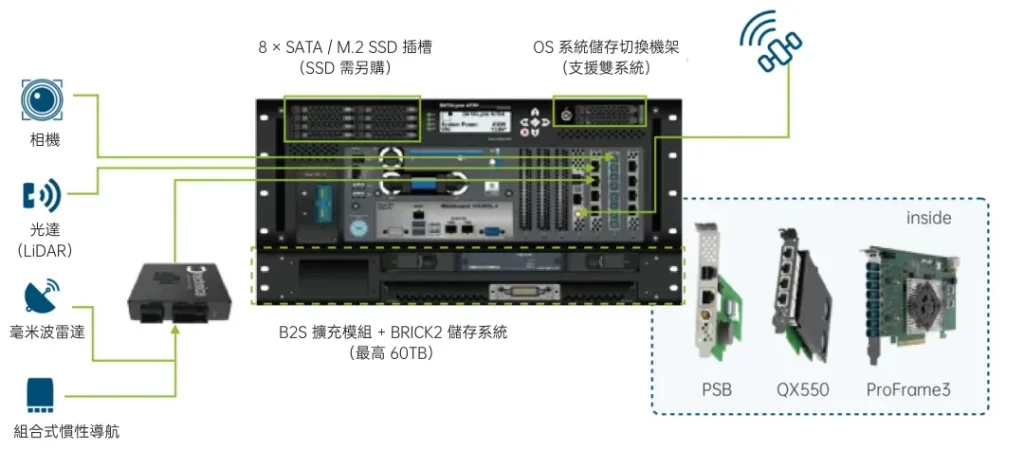
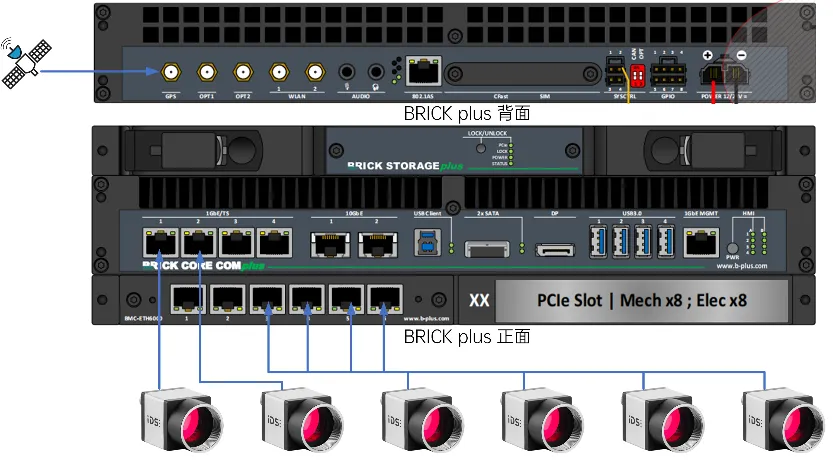
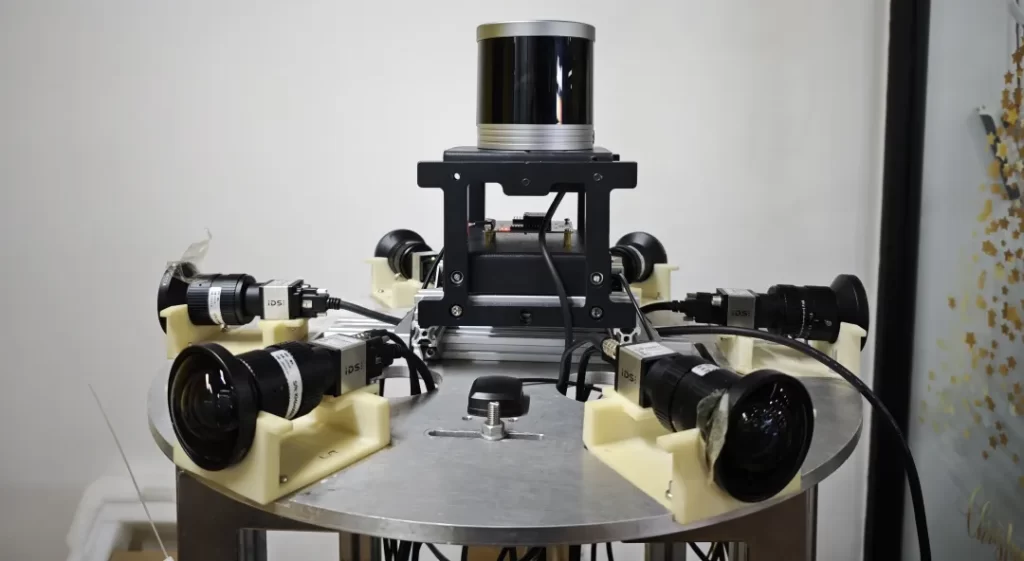
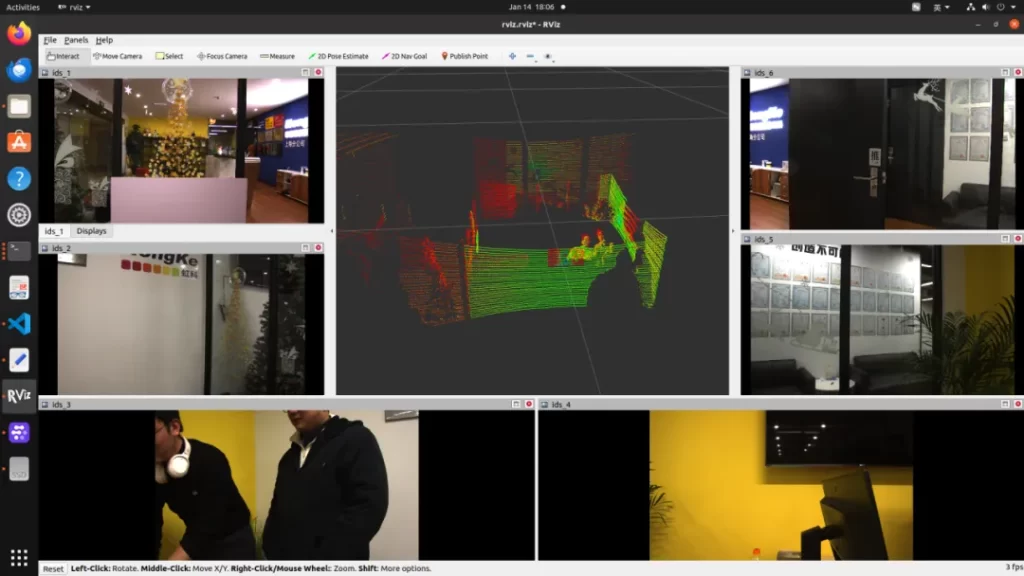
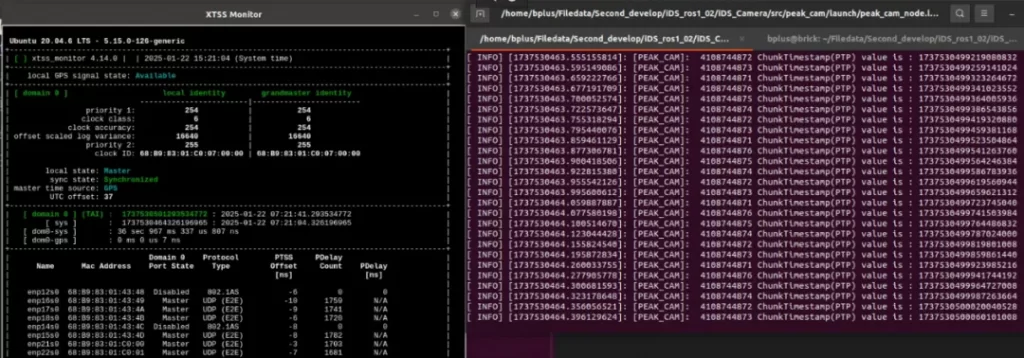
宏虹分享|PTP 多感測器時間同步架構:自動駕駛 BEV 感知資料擷取解決方案 Post author:Sharon Chen Post published:March 9, 2026 Post category:Autonomous Driving 一、引言 在自動駕駛研究與 BEV(Bird’s-Eye View)感知系統開發中,多感測器資料的時間同步是確保資料品質與演算法準確性的關鍵基礎。宏虹多感測器時間同步解決方案透過 IEEE 1588 PTP、硬體觸發與奈秒等級時間戳記技術,建立統一時間基準,協助研究團隊與自動駕駛實驗室提升資料擷取品質、確保實驗可重現性,並降低不必要的計算資源浪費。 二、BEV 感知研究中的時間同步挑戰 在大學自動駕駛實驗室中,研究團隊常以BEV(Bird’s-Eye View)感知架構作為主要研究方向。透過多組相機與光達(LiDAR)資料,在空間中重建統一的車輛環境模型,為後續的目標偵測與語意分割提供高精度語意地圖。然而,一旦相機之間的時間同步出現數十毫秒以上的誤差,BEV 投影模型便可能失效,並引發一系列典型問題: 多相機拼接的鳥瞰影像在特徵層出現斷裂,導致 Transformer 或卷積融合網路在訓練階段難以收斂,使模型訓練過程持續震盪。擷取的資料因延遲導致與真實世界時間序列錯位,在投影至光達或 IMU 座標系時產生明顯重影,使外參標定結果難以重現。隨著實驗進行,資料時間序列逐漸漂移,使離線評估建立的時序關係無法反映車輛實際運行狀態,最終導致研究成果缺乏可重現性。 許多團隊在排查問題時往往投入大量算力與人力,但問題的根源往往並不在於演算法本身,而是感測器之間缺乏統一且可靠的時間基準。因此,在自動駕駛研究環境中,建立高精度的多感測器時間同步機制,是確保 BEV 感知與 Sensor Fusion 演算法可靠運作的重要基礎。 三、多感測器時間同步的三大核心問題 多源異構感測器的時間同步,通常會面臨三個主要技術挑戰:時鐘一致性資料傳輸鏈路穩定性時間戳記準確度 感測器獨立時鐘漂移 每個感測器(例如相機與光達)通常都具有獨立晶振,其振盪頻率可能存在 ppm 等級的固有偏差。這意味著即使在系統啟動時完成時間同步,各感測器的本地時間仍會隨著時間逐漸產生偏差。如同不同精度的秒錶同時開始計時,即使初始同步,誤差仍會持續累積,短時間內就可能出現毫秒等級的時間偏移。 觸發與資料傳輸延遲 若採用軟體觸發機制,時間控制會受到作業系統排程影響,產生毫秒等級的隨機抖動。此外,不同感測器可能透過不同通訊介面傳輸資料,例如:GigE Vision 相機CAN 匯流排雷達GMSL 相機即使在同一時刻觸發,各資料流進入主機系統的時間仍可能出現差異,進而影響資料對齊。 滯後的時間戳記 另一個常見問題是時間戳記建立時機過晚。若時間戳記是在資料進入作業系統核心或應用層之後才建立,該時間戳記已經包含觸發延遲與傳輸延遲。使用這類「受延遲影響的時間戳記」進行資料對齊,將會使後續的 Sensor Fusion 與演算法運算建立在錯誤的時間基準上。理想情況下,時間戳記應在 資料離開感測器或進入實體鏈路的瞬間完成標記。 四、宏虹多感測器時間同步解決方案 為解決上述問題,宏虹提供奈秒等級多感測器時間同步架構,透過 PTP 主時鐘、硬體時間戳記與硬體觸發技術,建立統一時間基準。 PTP 高精度時間同步架構 宏虹多感測器時間同步系統建構於 XTSS 時間同步架構之上。系統以 DATALynx ATX4 或 BRICK2 作為 PTP Grandmaster(主時鐘),透過 IEEE 1588 PTP 高精度時間同步協定,有效消除各感測器獨立晶振所造成的時間漂移。 硬體時間戳與硬體觸發 系統透過 QX550 與 ProFrame3 等硬體設備直接對接感測器實體層,確保在資料離開感測器的瞬間完成時間戳記錄。同時透過硬體觸發取代軟體觸發,可大幅降低作業系統排程抖動造成的時間誤差。最終建立奈秒等級精度的統一時間基準。 ROS 與 ADTF 系統整合 宏虹時間同步架構可與常見自動駕駛資料處理平台整合,例如:ROSADTF系統可完成從微秒等級軟體同步到奈秒等級硬體同步的升級,為自動駕駛資料擷取與感測器融合提供可靠時間基礎 五、多感測器時間同步在自動駕駛研究中的應用價值 宏虹多感測器時間同步解決方案可從資料品質、實驗可重現性、資源效率與教學應用四個面向,支援自動駕駛研究。提升資料品質精確的時間戳記可有效抑制 BEV、Multi-View Stereo 與 Sensor Fusion 過程中的影像重影與漂移問題,減少資料重複擷取。確保實驗可重現性統一時間基準可確保相同實驗腳本在不同採集日期與不同測試車輛上保持一致,方便研究成果驗證與資料共享。降低 GPU 計算資源浪費避免因資料時間錯位導致模型訓練無法收斂,減少無效訓練迭代,進而節省 GPU 計算資源。支援自動駕駛教學與研究課程設計可直接結合宏虹工程實務案例,快速建立完整的研究流程:資料擷取 → 資料標註 → 模型訓練 → 模型評估 六、結語 宏虹多源異構感測器奈秒等級時間同步解決方案,建構於 XTSS 時間同步架構之上,以PTP 高精度時間同步協定、硬體觸發與實體層時間戳記技術為核心,建立奈秒等級的統一時間基準,從根本上解決多源異構感測器資料的時間對齊問題。此解決方案不僅能提升資料集品質、確保實驗結果的可重現性並節省 GPU 計算資源,也能透過成熟的工程案例協助教學與研究團隊快速建立 「資料擷取-資料標註-模型訓練-模型評估」 的完整流程,為大學自動駕駛研究與教學提供可靠的技術支援。 Learn more about our products B-plus 自動駕駛數據獲取平台 精準擷取、高穩定,打造自動駕駛數據獲取與分析平台宏虹b-plus專為自動駕駛與 ADAS 開發、測試與驗證場景所設計。平台可同步擷取車載乙太網路、CAN/CAN FD、感測器與影像資料,並確保高精度時間同步與長時間穩定記錄,廣泛應用於道路測試、實驗室驗證與系統整合測試,協助建立可追溯、可分析、可驗證的自動駕駛資料流程。即插即用的數據獲取架構:快速整合車載乙太網路、CAN/CAN FD 與感測器資料,降低系統建置與部署成本支援高頻與大頻寬資料流:滿足自動駕駛感測器、影像與控制訊號的高速資料擷取需求高精度時間同步機制:支援 PTP/硬體時間戳,確保多感測器資料可正確對齊與融合跨平台系統相容性:支援 Windows、Linux 等作業系統,可整合既有測試與開發環境穩定長時間記錄能力:適用於道路實測與耐久測試,確保資料完整性與可靠性➢ 點擊聯繫諮詢 📩 Honghong will provide you with any support you need! Our professional Honghong team will be the first to respond and provide you with the best service to solve all your problems. Company Name name and surname E-Mail Phone Number leave a message transmit Tags: b-plus, 自動駕駛測試, Vehicle Ethernet Read more articles Previous Post宏虹分享|端到端自動駕駛時代來臨:從仿真測試到XIL架構,自動駕駛系統如何真正落地量產? Next Post宏虹分享|車載SerDes顯示測試方案:proFRAME 螢幕影像注入與GMSL / FPD-Link驗證平台 You Might Also Like Honghong Sharing | Ocean Multi-Sensor Fusion Data Acquisition Platform for Manned Vessel Precision Real-Time Surveillance May 2, 2025 News] MAXTRON and b-plus Formalize Partnership to Develop V&V Measurement Solutions February 21, 2023 宏虹分享|端到端自動駕駛時代來臨:從仿真測試到XIL架構,自動駕駛系統如何真正落地量產? February 5, 2026
Honghong Sharing | Ocean Multi-Sensor Fusion Data Acquisition Platform for Manned Vessel Precision Real-Time Surveillance May 2, 2025
News] MAXTRON and b-plus Formalize Partnership to Develop V&V Measurement Solutions February 21, 2023