
Optical radar LiDAR is a key technology for many cutting-edge applications. However, with so many different types of optical radar on the market, choosing the right optical radar for your application can sometimes be tricky. How do you differentiate between the different types of optical radar? What are the key parameters and technical specifications that can be used to evaluate their performance? In this article, Avision will unveil the mystery of optical radar parameters for you.
光學雷達 LiDAR 參數
光學雷達 LiDAR 參數主要有:探測距離、視場(FoV)、掃描模式、抗串擾抗干擾度、檢出率、多次回波、測距精度和準確度。

1、 LiDAR 探測距離
在眾多的參數中,探測距離可能是最重要的一項。探測距離指的是感測器能探測到物體的最遠距離。這在很大程度上取決於雷射光源的功率。功率越高,探測物體的距離就越遠,但允許的最大雷射光功率受人眼安全規定的限制。決定探測距離的其他因素包括光學雷達的特性(如雷射器類型和孔徑大小)、反射對象的特性(如尺寸、距離、反射率、漫反射或鏡面反射)以及天氣和溫度等外部影響。
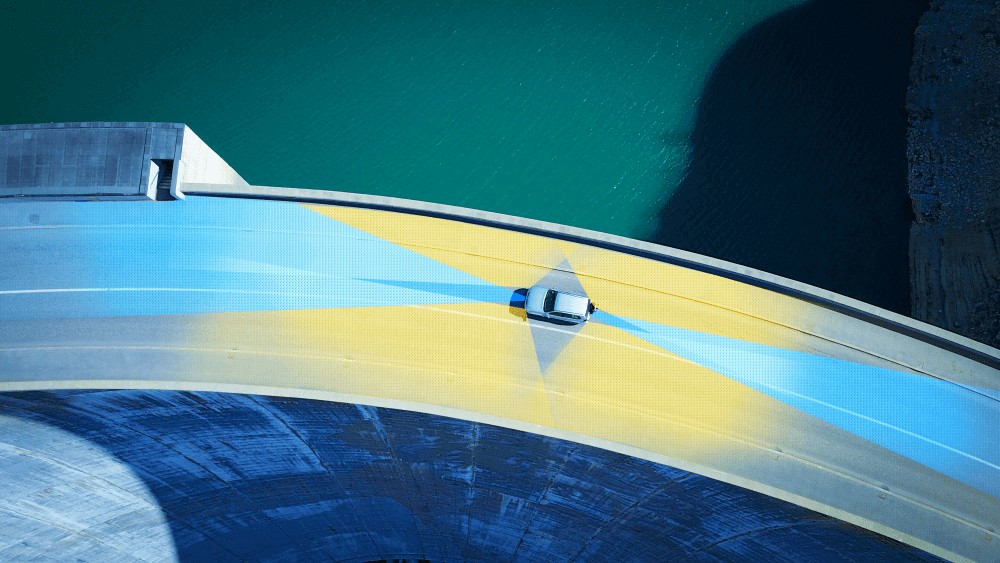
在入侵檢測系統中,長距離檢測十分重要。可以將光學雷達安裝在牆上或者柵欄上,探測任何進入預定區域的物體,可通過算法實現對象分類,使得系統只有在滿足特定條件下才發出警報。如果需要探測的距離特別長,但光學雷達探測的距離有限,那麼就需要多個光學雷達感測器覆蓋整個周邊,以實現系統入侵檢測功能。因此,為使得系統更容易管理且經濟成本更低,選擇長距光學雷達是理想方案。
虹科的基於MEMS技術固態光學雷達具有較大的探測距離。反射鏡面的獨特設計,直徑超過10mm,使得光電探測器檢測到大量反射回來的光子,從而可靠地探測到高達250米的弱反射物。
Trivia
光學雷達的探測範圍描述了它能探測到物體的最遠距離。決定因素大致可分為三大類:
- 光學雷達的特性(例如:雷射光類型、雷射光源功率、孔徑大小)
- 外部影響(如雨、霧、雪、陽光)
- 物體的特性(如尺寸、距離、反射率、漫反射或鏡面反射)
2、 LiDAR 視場(FoV)
視場角是光學雷達感測器覆蓋的角度或者是光學雷達信號發射的角度。不同的光學雷達技術有很大的不同,例如:機械式光學雷達通常通過機械結構旋轉16-32個堆疊的雷射光源來產生視場,能夠提供360度的周圍環境資訊。其結構並不復雜,價格更便宜。但魯棒性更強的固態光學雷達,使用較少的雷射光源,虹科固態光學雷達只有一個雷射光源,一次只擊中一個點。為了逐點掃描周圍環境,光束被偏轉或“掃描”。
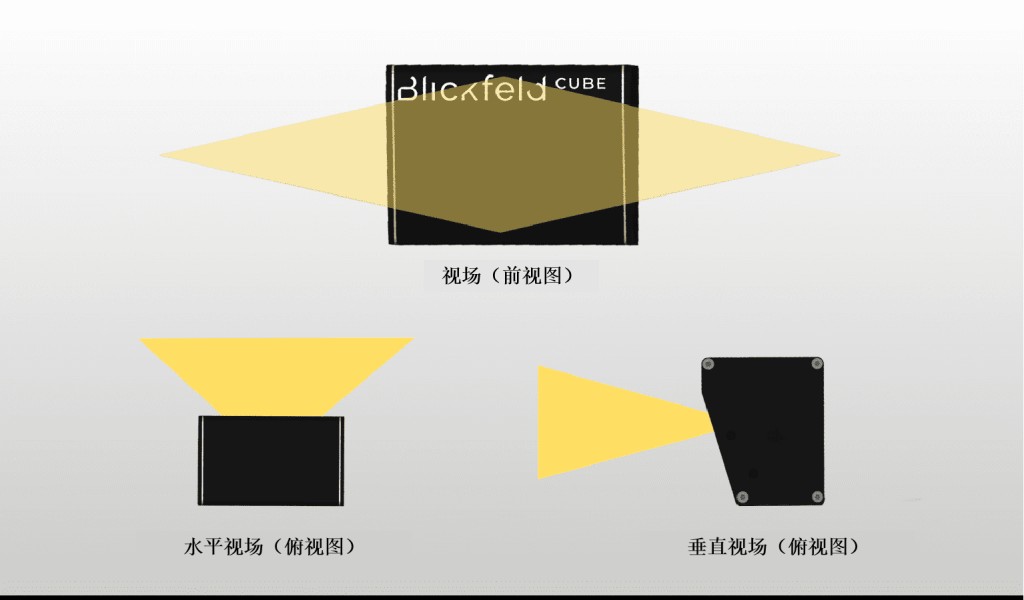
虹科固態光學雷達可以靈活配置視場角。假設每個掃描周期發射的雷射光信號量始終相同,減小角度和垂直視場將導致點雲更密集,而增加垂直視場將使光學雷達返回信號分散得更遠。對於水平視場,在保持視場不變的情況下,可以改變點間距。
FoV的選擇根據應用的需要以及許多其他因素而變化,例如要掃描的對象類型或其表面特性。例如,在茂密的森林中需要更寬的視野才能獲取足夠的環境資訊。如果是城市裡,遍布高樓大廈和狹窄街道,則更加傾向於窄小的視場角。
Trivia
視場是光學雷達信號發射的角度。根據光學雷達技術的不同,視場有很大的不同。FoV的選擇會隨著不同應用的需求以及許多其他因素而變化,例如要掃描的對象類型或其表面特性。
3、 LiDAR 掃描模式
在一長串的光學雷達參數列表中,掃描模式是光學雷達最重要、最有趣的參數。掃描式光學雷達有光束偏轉裝置或掃描裝置,可以使雷射光束在不同的方向上偏轉以進行測距測量,形成獨特的掃描模式。這些模式特徵有所不同,如掃描線的數量或點密度。光學雷達投入應用中,掃描模式的特徵十分重要。例如,在人員統計應用中,計算某個區域中的人數,高解析度的點雲至關重要。為了達到所需的解析度,則需要大量的掃描線。
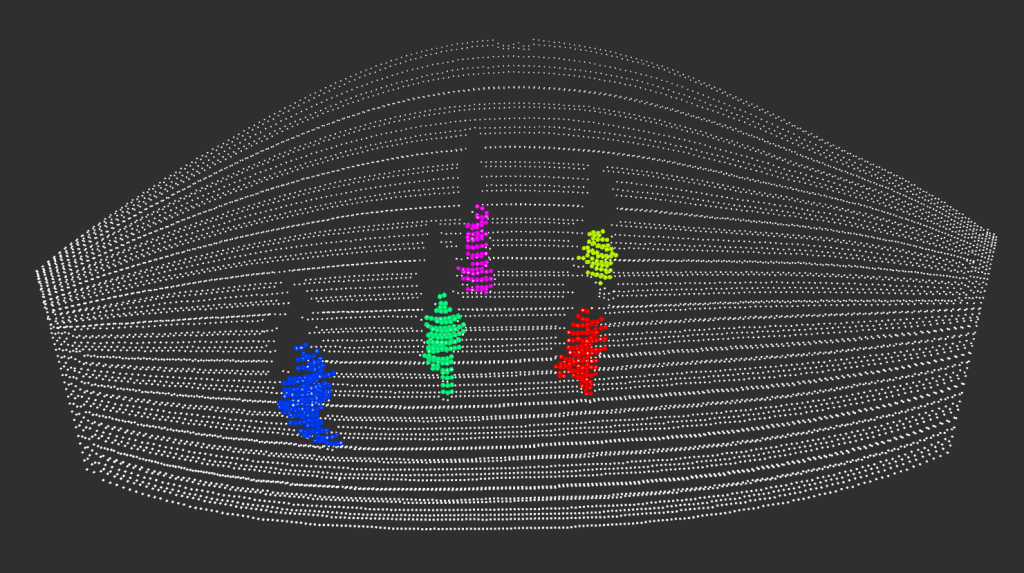
虹科固態光學雷達的特殊之處在於,可以很容易地對掃描線數量進行配置,即使在使用光學雷達時也能對掃描線數量進行修改。感測器可根據應用及其不同需求進行配置,例如,通過重新配置掃描線密度,可以無縫地從普通視圖切換到高解析度圖像。
Trivia
掃描式光學雷達使雷射光束在不同的方向偏轉以進行測距測量,形成獨特的模式,稱為掃描模式。這些模式由於特性不同,支持的應用場景也不同。
4、 LiDAR 抗串擾抗干擾度
在許多可能同時出現多個感測器的實時應用中,抗串擾抗干擾度是另一個至關重要的參數。例如,自動駕駛車輛上的光學雷達感測器可能會在其視野範圍內從另一輛車的光學雷達感測器接收雷射光信號,從而導致錯誤檢測。因此,道路上的障礙物可能會被錯誤地檢測到,從而導致不必要和潛在危險的緊急制動。如果寄生回波足夠強,它可能會分散光學雷達的視線,從而帶來更嚴重的安全隱患。陽光也帶來了很大的挑戰,因為它會導致感測器採集的噪音信息,降低信號的可靠性和探測範圍。有幾種方法可以確保串擾不會影響光學雷達感測器。下面列舉了兩種:
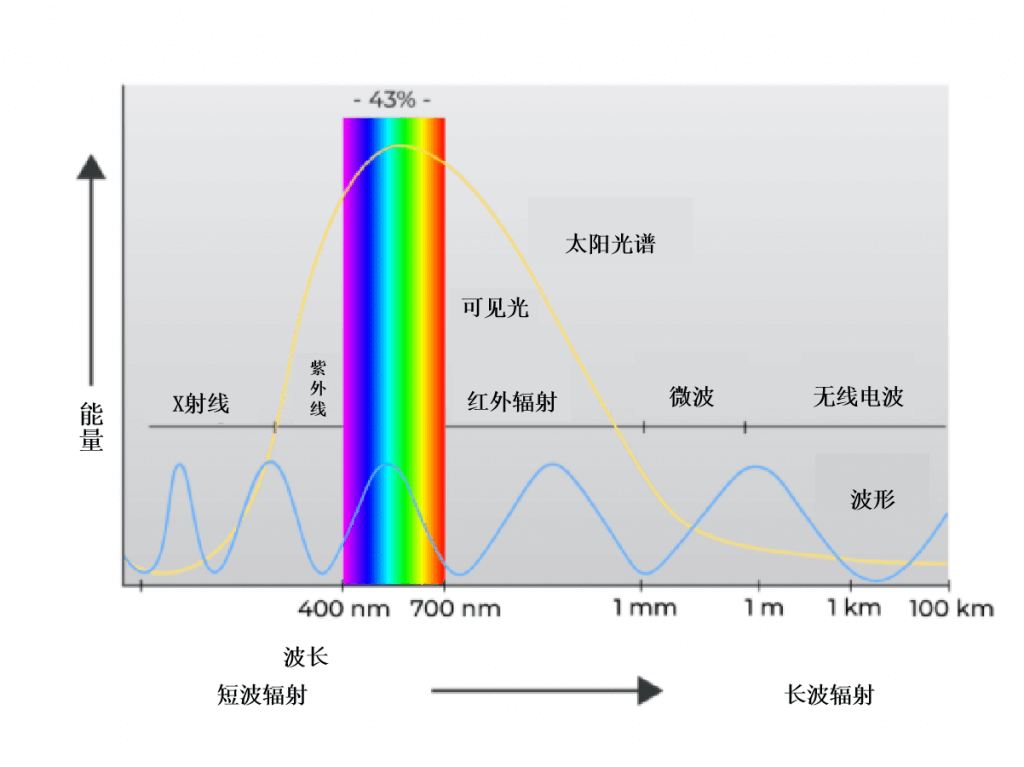
● 頻譜濾波:
立方體的工作波長為905nm,接近電磁光譜的紅外區域。在探測器前面還有一個過濾器,只允許波長相近的電磁波通過,同時阻擋其他電磁波。因此,立方體對來自其他光學雷達的雷射光沒有反應,這些光學雷達的工作波長不同,例如1550納米。然而,探測器仍然容易被另一個905nm雷射光信號所欺騙。為了解決這個問題,我們採用了一種稱為空間濾波的技術。
● 空間濾波:
虹科固態光學雷達的同軸設計允許它通過與光束偏轉單元發射相同的路徑接收雷射光的反射。這樣可以確保探測器只捕捉到發射到特定方向的光子,並且對來自不同方向的其他光子“視而不見”。
基本上,另一個光學雷達感測器在自動駕駛車輛上必須發送一個精確相同的角度,但方向相反的雷射光脈衝,同時還要有一個正確的時間窗口,以便感測器檢測並產生虛假回波。這種情況發生的可能性取決於許多因素,如光學雷達之間的距離、掃描速率、光束發散和相對方向,因此,該情況發生的機率極小。
頻譜和空間濾波也有助於減小陽光產生的信號噪聲,並將其對距離性能的影響降到最低。虹科固態光學雷達的探測範圍是在100 klux光強度下測得的。
Trivia
當多個感測器發出的信號不是光學雷達的發送方時,就會發生串擾,從而導致錯誤檢測。串擾可以通過諸如頻譜和空間濾波等措施最小化。
5、檢測率
檢測率(DR)是檢測到真實目標上所選點的比例。相反,誤報率(FPR)衡量的是在沒有真實物理目標的情況下,在點雲中檢測到回波的比例。
錯誤檢測是不可取的,因為它們降低了點雲的精度,從而降低了目標識別的可靠性。在我們上面的入侵檢測系統的例子中,如果光學雷達的檢測率很低,在監控應用中會出現越來越多的假警報,使得結果不可靠。
虹科固態光學雷達擁有高達90%的檢測率,誤報率小於0.2%。在要求高可靠性與一致性的應用場景中,其同樣適用。
Trivia
檢測率(DR)是檢測到真實目標上所選點的比例。錯誤檢測是不可取的,因為它們降低了點雲的精度,降低了目標識別的可靠性。
6、多次回波
光學雷達通常在發射雷射光束後接收到不止一次的反射,因為它隨著距離的不斷增加會變寬或發散。因此當一部分光束擊中最近的目標時,其中一些光束可能會擊中距離較遠的目標。這意味著光束將返回不同的信號,有多個返回值。
如果光學雷達只能測量單個回波,它將只顯示由算法或反射強度定義的一個目標。通常,只有最接近感測器的目標才會被記錄下來,而後面的目標則不會被檢測到。
可以處理多次回波的光學雷達也可以探測到部分被物體阻擋的目標,這增加了相同數量的雷射光脈衝收集的數據量和深度。
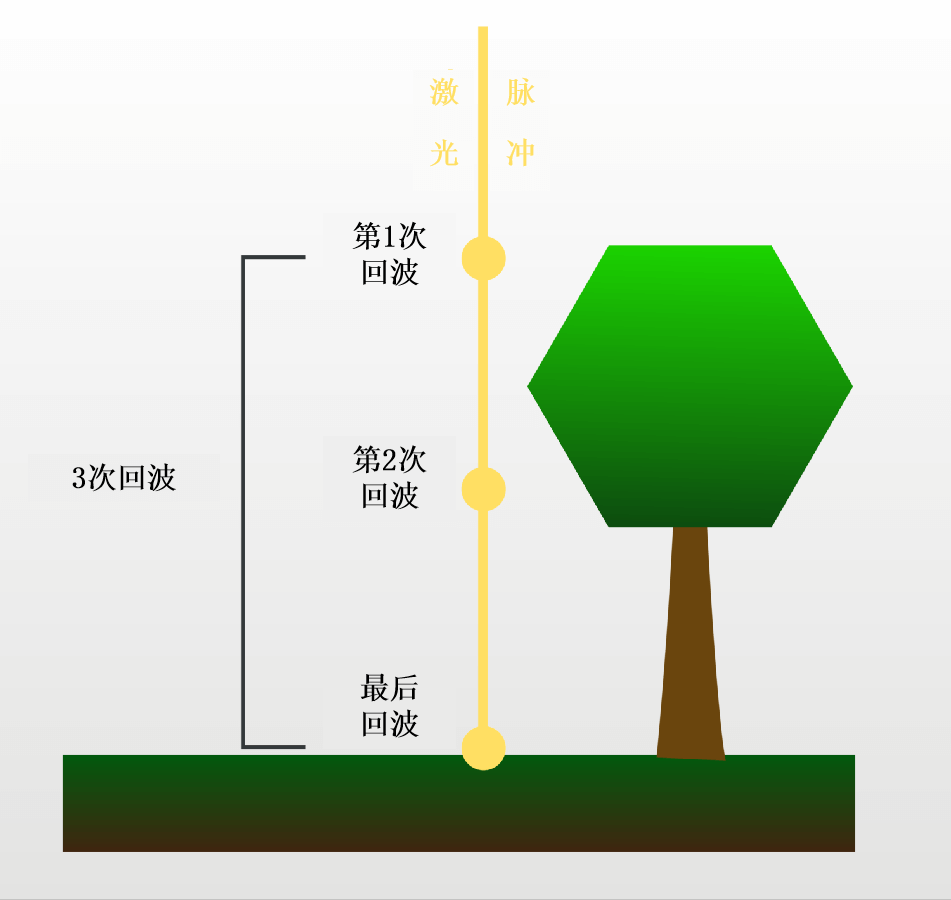
一個典型的使用案例是探測森林中的樹葉,首先返回的是來自樹梢的反射光束。部分雷射光束可能會擊中沿途的一些樹枝並被反射,而另一部分雷射光束可能會擊中地面並返回。這將產生多次回波,光學雷達可能會記錄三個不同的距離。在這種情況下,第一個通常是最有意義的回報,因為它檢測到景觀中最高的特徵,樹梢。
虹科固態光學雷達最多支持測量三次的雷射光回波信號,並可以根據應用的要求配置測量回波數量,從而使感測器適用於各種各樣的案例。
Trivia
光學雷達發射的光束通常會隨著距離的增加而變寬或發散,並且可能會擊中不同的目標,從而測量到多次回波。可以處理多次回波的光學雷達能夠檢測到部分被遮擋的目標,這增加了採集數據的數量和深度。
7、測距精度和準確度
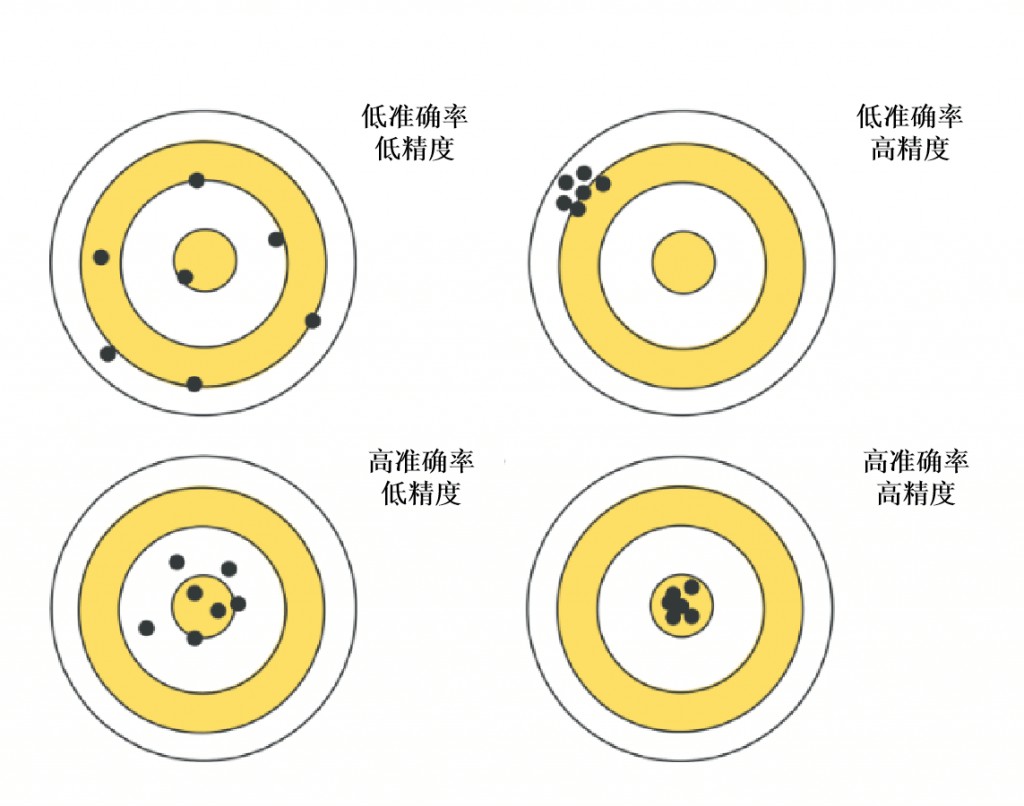
測距精度和準確度是光學雷達的關鍵參數,了解兩者之間的區別非常重要,因為它們常常相互混淆。
● 測距精度:
精度是衡量光學雷達採集數據重複性的指標。高精度意味著對同一目標的重複測量將非常接近平均值,低精度意味著在均值附近的離散值較大。
測距精度對於測速相機等應用來說至關重要,在這些應用中,使用光學雷達必須在短時間內計算出與運動目標之間的距離,從而進一步計算出車輛的速度。
測距精度取決於感測器與目標之間的距離以及目標的特性,如反射率和攻角。虹科固態光學雷達的特點是測距精度小於2釐米。
Trivia
精度是衡量光學雷達採集數據重複性的指標。高精度意味著重複測量接近平均值。準確度定義了測量值與實際值的接近程度,測距準確度高的光學雷達測得的距離值將非常接近實際距離。
Conclusion
光學雷達感測器處於技術革命的前沿,應用領域十分廣泛。它們有各種形狀和尺寸,最重要的是基於不同的技術。因此,了解不同的技術規格對於選擇適合特定應用的感測器至關重要。
Recommended Products
 MEMS Solid State Optical Radar HKCube 1
MEMS Solid State Optical Radar HKCube 1
 MEMS Solid State Optical Radar HKCube Range 1
MEMS Solid State Optical Radar HKCube Range 1
宏虹電子科技有限公司|台灣虹科
宏虹電子科技有限公司,總公司廣州虹科電子科技有限公司-位於中國南方經濟和文化中心的廣州市。我們耕耘的領域包括數據採集﹑無線電通信與監測﹑測試測量﹑汽車電子﹑自動化與嵌入式開發工具。十多年來,我們積累了豐富的知識和技術,加上與全球頂尖公司的技術和產品合作,我們一直為我們的用戶提供高質量﹑多功能整合系統﹑在地技術服務﹑及優質的解決方案。


